#include <DecisionTreeFactor.h>
Public Types | |
| typedef DiscreteFactor | Base |
| Typedef to base class. More... | |
| typedef boost::shared_ptr< DecisionTreeFactor > | shared_ptr |
| typedef DecisionTreeFactor | This |
 Public Types inherited from gtsam::DiscreteFactor Public Types inherited from gtsam::DiscreteFactor | |
| typedef Factor | Base |
| Our base class. More... | |
| typedef boost::shared_ptr< DiscreteFactor > | shared_ptr |
| shared_ptr to this class More... | |
| typedef boost::shared_ptr< Values > | sharedValues |
| typedef DiscreteFactor | This |
| This class. More... | |
| typedef Assignment< Key > | Values |
| Public Types inherited from gtsam::Factor | |
| typedef KeyVector::const_iterator | const_iterator |
| Const iterator over keys. More... | |
| typedef KeyVector::iterator | iterator |
| Iterator over keys. More... | |
| Public Types inherited from gtsam::Potentials | |
| typedef AlgebraicDecisionTree< Key > | ADT |
| Public Types inherited from gtsam::AlgebraicDecisionTree< Key > | |
| typedef DecisionTree< Key, double > | Super |
| Public Types inherited from gtsam::DecisionTree< Key, double > | |
| typedef boost::function< double(const double &, const double &)> | Binary |
| typedef std::pair< Key, size_t > | LabelC |
| typedef Node::Ptr | NodePtr |
| typedef boost::function< double(const double &)> | Unary |
Public Member Functions | |
Standard Constructors | |
| DecisionTreeFactor () | |
| DecisionTreeFactor (const DiscreteKeys &keys, const ADT &potentials) | |
| template<class SOURCE > | |
| DecisionTreeFactor (const DiscreteKeys &keys, SOURCE table) | |
| DecisionTreeFactor (const DiscreteConditional &c) | |
Testable | |
| bool | equals (const DiscreteFactor &other, double tol=1e-9) const override |
| equality More... | |
| void | print (const std::string &s="DecisionTreeFactor:\n", const KeyFormatter &formatter=DefaultKeyFormatter) const override |
| print More... | |
Standard Interface | |
| double | operator() (const Values &values) const override |
| Value is just look up in AlgebraicDecisonTree. More... | |
| DecisionTreeFactor | operator* (const DecisionTreeFactor &f) const override |
| multiply two factors More... | |
| DecisionTreeFactor | operator/ (const DecisionTreeFactor &f) const |
| divide by factor f (safely) More... | |
| DecisionTreeFactor | toDecisionTreeFactor () const override |
| Convert into a decisiontree. More... | |
| shared_ptr | sum (size_t nrFrontals) const |
| Create new factor by summing all values with the same separator values. More... | |
| shared_ptr | sum (const Ordering &keys) const |
| Create new factor by summing all values with the same separator values. More... | |
| shared_ptr | max (size_t nrFrontals) const |
| Create new factor by maximizing over all values with the same separator values. More... | |
Advanced Interface | |
| DecisionTreeFactor | apply (const DecisionTreeFactor &f, ADT::Binary op) const |
| shared_ptr | combine (size_t nrFrontals, ADT::Binary op) const |
| shared_ptr | combine (const Ordering &keys, ADT::Binary op) const |
| Public Member Functions inherited from gtsam::DiscreteFactor | |
| DiscreteFactor () | |
| template<typename CONTAINER > | |
| DiscreteFactor (const CONTAINER &keys) | |
| virtual | ~DiscreteFactor () |
| Virtual destructor. More... | |
| void | print (const std::string &s="DiscreteFactor\n", const KeyFormatter &formatter=DefaultKeyFormatter) const override |
| print More... | |
| virtual bool | empty () const |
| Public Member Functions inherited from gtsam::Factor | |
| virtual | ~Factor ()=default |
| Default destructor. More... | |
| KeyVector & | keys () |
| iterator | begin () |
| iterator | end () |
| virtual void | printKeys (const std::string &s="Factor", const KeyFormatter &formatter=DefaultKeyFormatter) const |
| print only keys More... | |
| Key | front () const |
| First key. More... | |
| Key | back () const |
| Last key. More... | |
| const_iterator | find (Key key) const |
| find More... | |
| const KeyVector & | keys () const |
| Access the factor's involved variable keys. More... | |
| const_iterator | begin () const |
| const_iterator | end () const |
| size_t | size () const |
| Public Member Functions inherited from gtsam::Potentials | |
| size_t | cardinality (Key j) const |
| GTSAM_EXPORT bool | equals (const Potentials &other, double tol=1e-9) const |
| GTSAM_EXPORT | Potentials () |
| GTSAM_EXPORT | Potentials (const DiscreteKeys &keys, const ADT &decisionTree) |
| template<class SOURCE > | |
| Potentials (const DiscreteKeys &keys, SOURCE table) | |
| GTSAM_EXPORT void | print (const std::string &s="Potentials: ", const KeyFormatter &formatter=DefaultKeyFormatter) const |
| Public Member Functions inherited from gtsam::AlgebraicDecisionTree< Key > | |
| AlgebraicDecisionTree () | |
| AlgebraicDecisionTree (const Super &add) | |
| AlgebraicDecisionTree (const Key &label, double y1, double y2) | |
| AlgebraicDecisionTree (const typename Super::LabelC &labelC, double y1, double y2) | |
| AlgebraicDecisionTree (const std::vector< typename Super::LabelC > &labelCs, const std::vector< double > &ys) | |
| AlgebraicDecisionTree (const std::vector< typename Super::LabelC > &labelCs, const std::string &table) | |
| AlgebraicDecisionTree (Iterator begin, Iterator end, const Key &label) | |
| AlgebraicDecisionTree (const AlgebraicDecisionTree< M > &other, const std::map< M, Key > &map) | |
| AlgebraicDecisionTree | operator* (const AlgebraicDecisionTree &g) const |
| AlgebraicDecisionTree | operator+ (const AlgebraicDecisionTree &g) const |
| AlgebraicDecisionTree | operator/ (const AlgebraicDecisionTree &g) const |
| AlgebraicDecisionTree | sum (const Key &label, size_t cardinality) const |
| AlgebraicDecisionTree | sum (const typename Super::LabelC &labelC) const |
| Public Member Functions inherited from gtsam::DecisionTree< Key, double > | |
| DecisionTree (const double &y) | |
| DecisionTree (const Key &label, const double &y1, const double &y2) | |
| DecisionTree (const LabelC &label, const double &y1, const double &y2) | |
| DecisionTree (const std::vector< LabelC > &labelCs, const std::vector< double > &ys) | |
| DecisionTree (const std::vector< LabelC > &labelCs, const std::string &table) | |
| DecisionTree (Iterator begin, Iterator end, const Key &label) | |
| DecisionTree (const Key &label, const DecisionTree &f0, const DecisionTree &f1) | |
| DecisionTree (const DecisionTree< M, X > &other, const std::map< M, Key > &map, boost::function< double(const X &)> op) | |
| DecisionTree (const NodePtr &root) | |
| NodePtr | compose (Iterator begin, Iterator end, const Key &label) const |
| void | print (const std::string &s="DecisionTree") const |
| bool | equals (const DecisionTree &other, double tol=1e-9) const |
| virtual | ~DecisionTree () |
| bool | operator== (const DecisionTree &q) const |
| const double & | operator() (const Assignment< Key > &x) const |
| DecisionTree | apply (const Unary &op) const |
| DecisionTree | apply (const DecisionTree &g, const Binary &op) const |
| DecisionTree | choose (const Key &label, size_t index) const |
| DecisionTree | combine (const Key &label, size_t cardinality, const Binary &op) const |
| DecisionTree | combine (const LabelC &labelC, const Binary &op) const |
| void | dot (std::ostream &os, bool showZero=true) const |
| void | dot (const std::string &name, bool showZero=true) const |
Additional Inherited Members | |
| Public Attributes inherited from gtsam::DecisionTree< Key, double > | |
| NodePtr | root_ |
| Protected Member Functions inherited from gtsam::Factor | |
| Factor () | |
| template<typename CONTAINER > | |
| Factor (const CONTAINER &keys) | |
| template<typename ITERATOR > | |
| Factor (ITERATOR first, ITERATOR last) | |
| bool | equals (const This &other, double tol=1e-9) const |
| check equality More... | |
| Protected Member Functions inherited from gtsam::Potentials | |
| Potentials (const ADT &potentials) | |
| Protected Member Functions inherited from gtsam::DecisionTree< Key, double > | |
| NodePtr | convert (const typename DecisionTree< M, X >::NodePtr &f, const std::map< M, Key > &map, boost::function< double(const X &)> op) |
| NodePtr | create (It begin, It end, ValueIt beginY, ValueIt endY) const |
| DecisionTree () | |
| Static Protected Member Functions inherited from gtsam::Factor | |
| template<typename CONTAINER > | |
| static Factor | FromKeys (const CONTAINER &keys) |
| template<typename ITERATOR > | |
| static Factor | FromIterators (ITERATOR first, ITERATOR last) |
| Static Protected Member Functions inherited from gtsam::Potentials | |
| static GTSAM_EXPORT double | safe_div (const double &a, const double &b) |
| Protected Attributes inherited from gtsam::Factor | |
| KeyVector | keys_ |
| The keys involved in this factor. More... | |
| Protected Attributes inherited from gtsam::Potentials | |
| std::map< Key, size_t > | cardinalities_ |
| Cardinality for each key, used in combine. More... | |
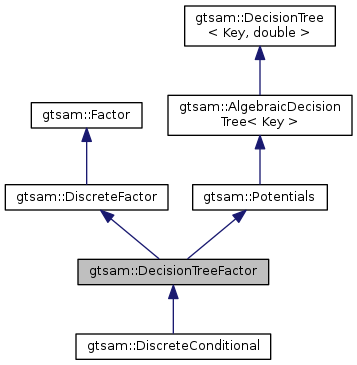
Detailed Description
A discrete probabilistic factor
Definition at line 38 of file DecisionTreeFactor.h.
Member Typedef Documentation
Typedef to base class.
Definition at line 44 of file DecisionTreeFactor.h.
| typedef boost::shared_ptr<DecisionTreeFactor> gtsam::DecisionTreeFactor::shared_ptr |
Definition at line 45 of file DecisionTreeFactor.h.
Definition at line 43 of file DecisionTreeFactor.h.
Constructor & Destructor Documentation
| gtsam::DecisionTreeFactor::DecisionTreeFactor | ( | ) |
Default constructor for I/O
Definition at line 31 of file DecisionTreeFactor.cpp.
| gtsam::DecisionTreeFactor::DecisionTreeFactor | ( | const DiscreteKeys & | keys, |
| const ADT & | potentials | ||
| ) |
Constructor from Indices, Ordering, and AlgebraicDecisionDiagram
Definition at line 35 of file DecisionTreeFactor.cpp.
|
inline |
Constructor from Indices and (string or doubles)
Definition at line 60 of file DecisionTreeFactor.h.
| gtsam::DecisionTreeFactor::DecisionTreeFactor | ( | const DiscreteConditional & | c | ) |
Construct from a DiscreteConditional type
Definition at line 41 of file DecisionTreeFactor.cpp.
Member Function Documentation
| DecisionTreeFactor gtsam::DecisionTreeFactor::apply | ( | const DecisionTreeFactor & | f, |
| ADT::Binary | op | ||
| ) | const |
Apply binary operator (*this) "op" f
- Parameters
-
f the second argument for op op a binary operator that operates on AlgebraicDecisionDiagram potentials
Definition at line 64 of file DecisionTreeFactor.cpp.
| DecisionTreeFactor::shared_ptr gtsam::DecisionTreeFactor::combine | ( | size_t | nrFrontals, |
| ADT::Binary | op | ||
| ) | const |
Combine frontal variables using binary operator "op"
- Parameters
-
nrFrontals nr. of frontal to combine variables in this factor op a binary operator that operates on AlgebraicDecisionDiagram potentials
- Returns
- shared pointer to newly created DecisionTreeFactor
Definition at line 81 of file DecisionTreeFactor.cpp.
| DecisionTreeFactor::shared_ptr gtsam::DecisionTreeFactor::combine | ( | const Ordering & | keys, |
| ADT::Binary | op | ||
| ) | const |
Combine frontal variables in an Ordering using binary operator "op"
- Parameters
-
nrFrontals nr. of frontal to combine variables in this factor op a binary operator that operates on AlgebraicDecisionDiagram potentials
- Returns
- shared pointer to newly created DecisionTreeFactor
Definition at line 108 of file DecisionTreeFactor.cpp.
|
overridevirtual |
equality
Implements gtsam::DiscreteFactor.
Reimplemented in gtsam::DiscreteConditional.
Definition at line 46 of file DecisionTreeFactor.cpp.
|
inline |
Create new factor by maximizing over all values with the same separator values.
Definition at line 113 of file DecisionTreeFactor.h.
|
inlineoverridevirtual |
Value is just look up in AlgebraicDecisonTree.
Implements gtsam::DiscreteFactor.
Reimplemented in gtsam::DiscreteConditional.
Definition at line 83 of file DecisionTreeFactor.h.
|
inlineoverridevirtual |
multiply two factors
Implements gtsam::DiscreteFactor.
Definition at line 88 of file DecisionTreeFactor.h.
|
inline |
divide by factor f (safely)
Definition at line 93 of file DecisionTreeFactor.h.
|
overridevirtual |
Reimplemented from gtsam::Factor.
Reimplemented in gtsam::DiscreteConditional.
Definition at line 57 of file DecisionTreeFactor.cpp.
|
inline |
Create new factor by summing all values with the same separator values.
Definition at line 103 of file DecisionTreeFactor.h.
|
inline |
Create new factor by summing all values with the same separator values.
Definition at line 108 of file DecisionTreeFactor.h.
|
inlineoverridevirtual |
Convert into a decisiontree.
Implements gtsam::DiscreteFactor.
Definition at line 98 of file DecisionTreeFactor.h.
The documentation for this class was generated from the following files: