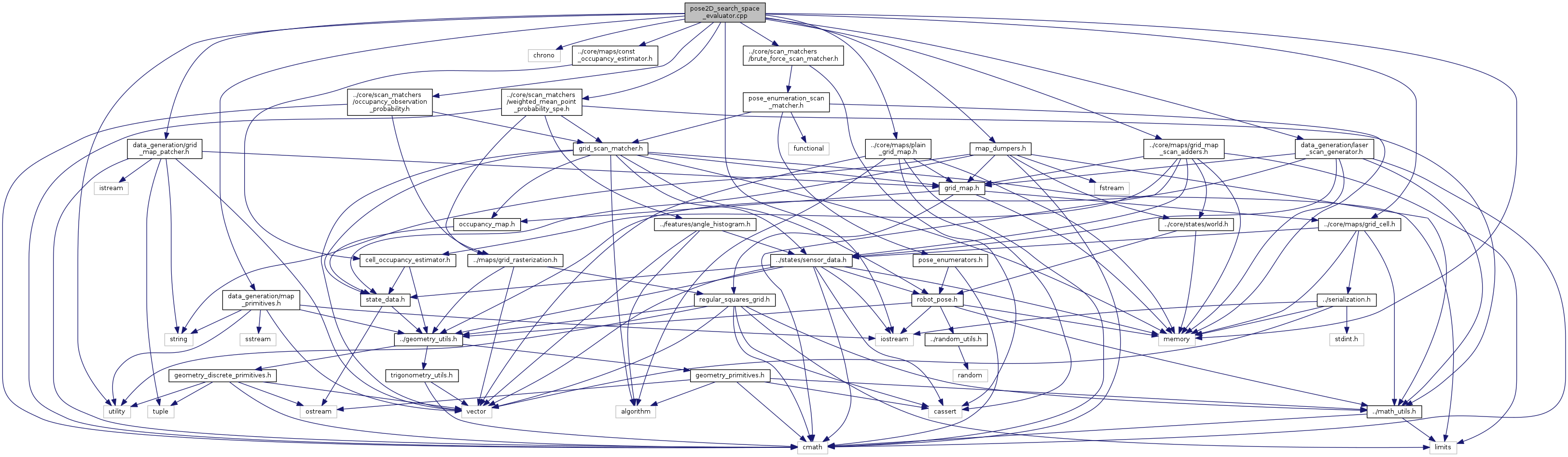
#include <iostream>#include <memory>#include <utility>#include <chrono>#include "../core/maps/grid_cell.h"#include "../core/maps/plain_grid_map.h"#include "data_generation/map_primitives.h"#include "data_generation/grid_map_patcher.h"#include "data_generation/laser_scan_generator.h"#include "map_dumpers.h"#include "../core/maps/grid_map_scan_adders.h"#include "../core/maps/const_occupancy_estimator.h"#include "../core/scan_matchers/occupancy_observation_probability.h"#include "../core/scan_matchers/weighted_mean_point_probability_spe.h"#include "../core/scan_matchers/brute_force_scan_matcher.h"
Include dependency graph for pose2D_search_space_evaluator.cpp:
Go to the source code of this file.
Classes | |
| class | LastWriteWinsGridCell |
| class | ScanMatcherSearchSpaceBuilder |
Functions | |
| void | dump_scan (const LaserScan2D &scan, const RobotPose &pose) |
| int | main (int argc, char **argv) |
| void | run_closed_corridor_case () |
| void | run_evaluation (const GridMap &map, double resolution) |
| void | run_open_corridor_case () |
| void | run_several_corridors_case () |
Function Documentation
| void dump_scan | ( | const LaserScan2D & | scan, |
| const RobotPose & | pose | ||
| ) |
Definition at line 141 of file pose2D_search_space_evaluator.cpp.
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 134 of file pose2D_search_space_evaluator.cpp.
| void run_closed_corridor_case | ( | ) |
Definition at line 64 of file pose2D_search_space_evaluator.cpp.
| void run_evaluation | ( | const GridMap & | map, |
| double | resolution | ||
| ) |
Definition at line 153 of file pose2D_search_space_evaluator.cpp.
| void run_open_corridor_case | ( | ) |
Definition at line 89 of file pose2D_search_space_evaluator.cpp.
| void run_several_corridors_case | ( | ) |
Definition at line 119 of file pose2D_search_space_evaluator.cpp.