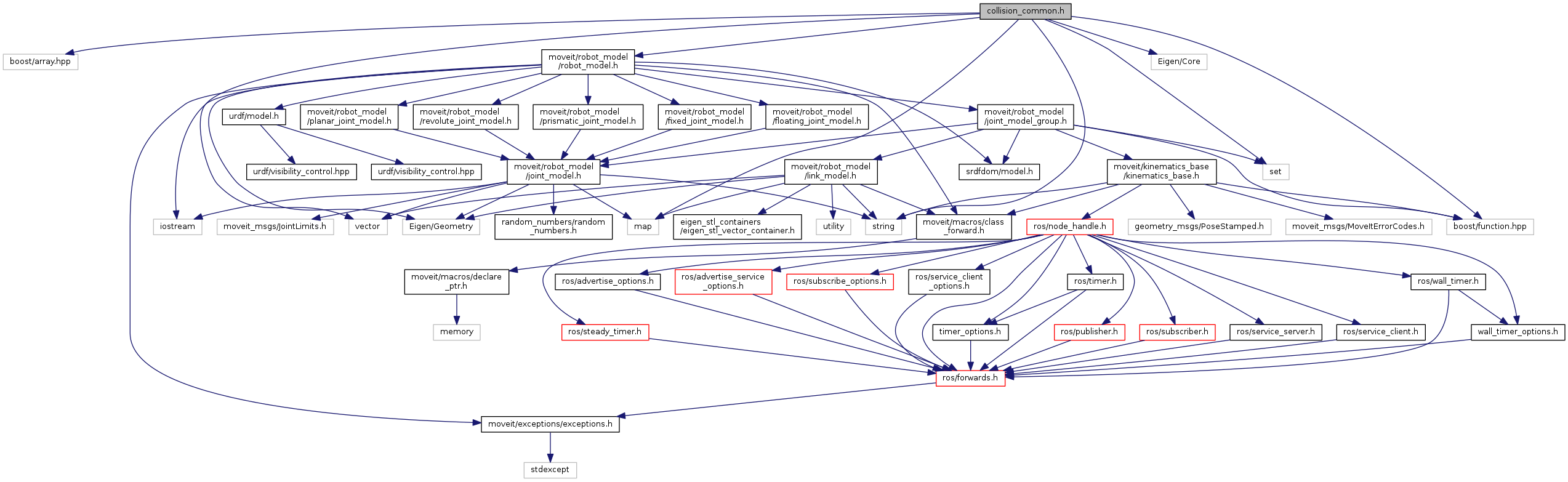
#include <boost/array.hpp>#include <boost/function.hpp>#include <vector>#include <string>#include <map>#include <set>#include <Eigen/Core>#include <moveit/robot_model/robot_model.h>
Include dependency graph for include/moveit/collision_detection/collision_common.h:
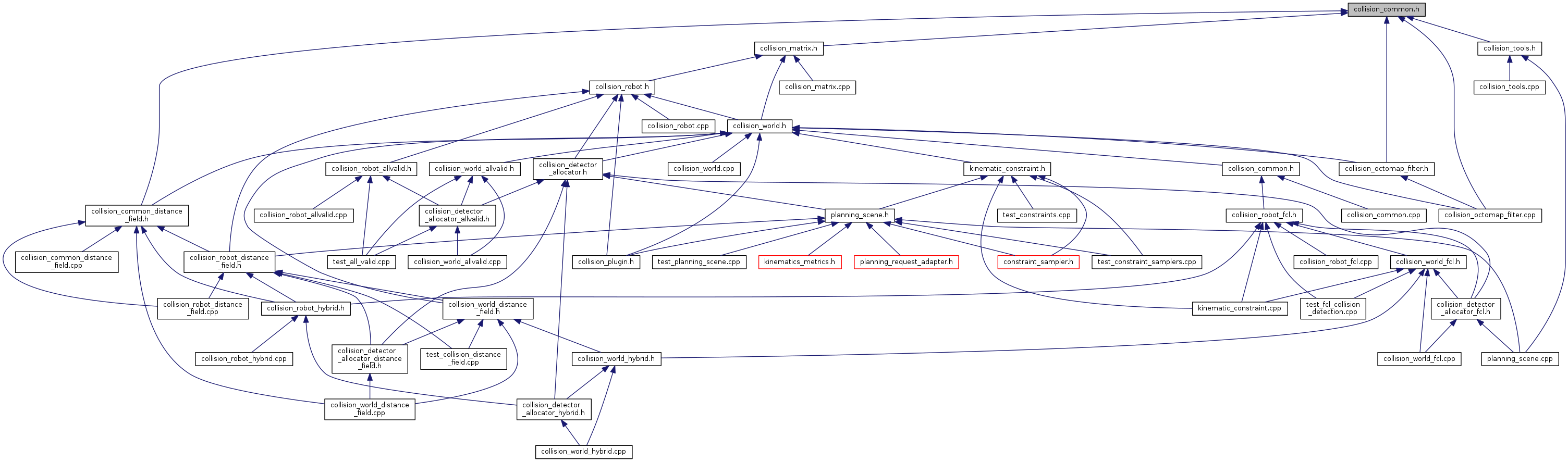
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | collision_detection::CollisionRequest |
| Representation of a collision checking request. More... | |
| struct | collision_detection::CollisionResult |
| Representation of a collision checking result. More... | |
| struct | collision_detection::Contact |
| Definition of a contact point. More... | |
| struct | collision_detection::CostSource |
| When collision costs are computed, this structure contains information about the partial cost incurred in a particular volume. More... | |
| struct | collision_detection::DistanceRequest |
| struct | collision_detection::DistanceResult |
| struct | collision_detection::DistanceResultsData |
Namespaces | |
| collision_detection | |
| Generic interface to collision detection. | |
| collision_detection::BodyTypes | |
| The types of bodies that are considered for collision. | |
| collision_detection::DistanceRequestTypes | |
Typedefs | |
| typedef BodyTypes::Type | collision_detection::BodyType |
| The types of bodies that are considered for collision. More... | |
| typedef std::map< const std::pair< std::string, std::string >, std::vector< DistanceResultsData > > | collision_detection::DistanceMap |
| typedef DistanceRequestTypes::DistanceRequestType | collision_detection::DistanceRequestType |
Functions | |
| collision_detection::MOVEIT_CLASS_FORWARD (AllowedCollisionMatrix) | |