|
| | CreateCollisionRobot (const robot_model::RobotModelConstPtr &model) |
| |
| void | getCollisionObject (const robot_state::RobotState &state, std::vector< std::shared_ptr< fcl::CollisionObject > > &obj) |
| |
| virtual void | checkOtherCollision (const CollisionRequest &req, CollisionResult &res, const robot_state::RobotState &state, const CollisionRobot &other_robot, const robot_state::RobotState &other_state) const |
| |
| virtual void | checkOtherCollision (const CollisionRequest &req, CollisionResult &res, const robot_state::RobotState &state, const CollisionRobot &other_robot, const robot_state::RobotState &other_state, const AllowedCollisionMatrix &acm) const |
| |
| virtual void | checkOtherCollision (const CollisionRequest &req, CollisionResult &res, const robot_state::RobotState &state1, const robot_state::RobotState &state2, const CollisionRobot &other_robot, const robot_state::RobotState &other_state1, const robot_state::RobotState &other_state2, const AllowedCollisionMatrix &acm) const |
| |
| virtual void | checkOtherCollision (const CollisionRequest &req, CollisionResult &res, const robot_state::RobotState &state1, const robot_state::RobotState &state2, const CollisionRobot &other_robot, const robot_state::RobotState &other_state1, const robot_state::RobotState &other_state2) const |
| |
| virtual void | checkSelfCollision (const CollisionRequest &req, CollisionResult &res, const robot_state::RobotState &state1, const robot_state::RobotState &state2, const AllowedCollisionMatrix &acm) const |
| |
| virtual void | checkSelfCollision (const CollisionRequest &req, CollisionResult &res, const robot_state::RobotState &state) const |
| |
| virtual void | checkSelfCollision (const CollisionRequest &req, CollisionResult &res, const robot_state::RobotState &state1, const robot_state::RobotState &state2) const |
| |
| virtual void | checkSelfCollision (const CollisionRequest &req, CollisionResult &res, const robot_state::RobotState &state, const AllowedCollisionMatrix &acm) const |
| |
| | CollisionRobotFCL (const robot_model::RobotModelConstPtr &kmodel, double padding=0.0, double scale=1.0) |
| |
| | CollisionRobotFCL (const CollisionRobotFCL &other) |
| |
| virtual void | distanceOther (const DistanceRequest &req, DistanceResult &res, const robot_state::RobotState &state, const CollisionRobot &other_robot, const robot_state::RobotState &other_state) const override |
| |
| virtual void | distanceSelf (const DistanceRequest &req, DistanceResult &res, const robot_state::RobotState &state) const override |
| |
| | CollisionRobot (const robot_model::RobotModelConstPtr &model, double padding=0.0, double scale=1.0) |
| |
| | CollisionRobot (const CollisionRobot &other) |
| |
| double | distanceOther (const robot_state::RobotState &state, const CollisionRobot &other_robot, const robot_state::RobotState &other_state) const |
| |
| double | distanceOther (const robot_state::RobotState &state, const CollisionRobot &other_robot, const robot_state::RobotState &other_state, const AllowedCollisionMatrix &acm) const |
| |
| double | distanceSelf (const robot_state::RobotState &state) const |
| |
| double | distanceSelf (const robot_state::RobotState &state, const AllowedCollisionMatrix &acm) const |
| |
| double | getLinkPadding (const std::string &link_name) const |
| |
| const std::map< std::string, double > & | getLinkPadding () const |
| |
| double | getLinkScale (const std::string &link_name) const |
| |
| const std::map< std::string, double > & | getLinkScale () const |
| |
| void | getPadding (std::vector< moveit_msgs::LinkPadding > &padding) const |
| |
| const robot_model::RobotModelConstPtr & | getRobotModel () const |
| |
| void | getScale (std::vector< moveit_msgs::LinkScale > &scale) const |
| |
| void | setLinkPadding (const std::map< std::string, double > &padding) |
| |
| void | setLinkPadding (const std::string &link_name, double padding) |
| |
| void | setLinkScale (const std::string &link_name, double scale) |
| |
| void | setLinkScale (const std::map< std::string, double > &scale) |
| |
| void | setPadding (double padding) |
| |
| void | setPadding (const std::vector< moveit_msgs::LinkPadding > &padding) |
| |
| void | setScale (double scale) |
| |
| void | setScale (const std::vector< moveit_msgs::LinkScale > &scale) |
| |
| virtual | ~CollisionRobot () |
| |
|
| void | allocSelfCollisionBroadPhase (const robot_state::RobotState &state, FCLManager &manager) const |
| |
| void | checkOtherCollisionHelper (const CollisionRequest &req, CollisionResult &res, const robot_state::RobotState &state, const CollisionRobot &other_robot, const robot_state::RobotState &other_state, const AllowedCollisionMatrix *acm) const |
| |
| void | checkSelfCollisionHelper (const CollisionRequest &req, CollisionResult &res, const robot_state::RobotState &state, const AllowedCollisionMatrix *acm) const |
| |
| void | constructFCLObject (const robot_state::RobotState &state, FCLObject &fcl_obj) const |
| |
| void | getAttachedBodyObjects (const robot_state::AttachedBody *ab, std::vector< FCLGeometryConstPtr > &geoms) const |
| |
| virtual void | updatedPaddingOrScaling (const std::vector< std::string > &links) |
| |
| std::vector< FCLCollisionObjectConstPtr > | fcl_objs_ |
| |
| std::vector< FCLGeometryConstPtr > | geoms_ |
| |
| std::map< std::string, double > | link_padding_ |
| |
| std::map< std::string, double > | link_scale_ |
| |
| robot_model::RobotModelConstPtr | robot_model_ |
| |
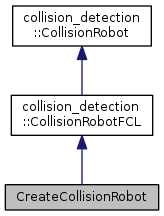
 Public Member Functions inherited from collision_detection::CollisionRobotFCL
Public Member Functions inherited from collision_detection::CollisionRobotFCL