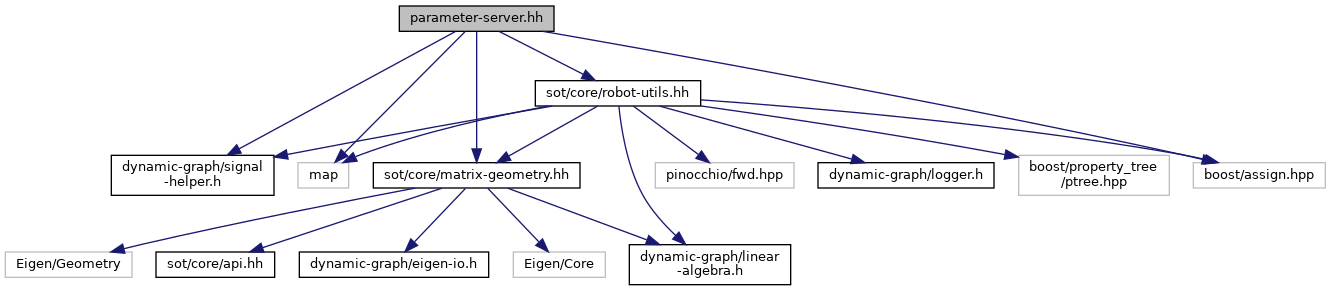
#include <dynamic-graph/signal-helper.h>#include <map>#include <sot/core/matrix-geometry.hh>#include <sot/core/robot-utils.hh>#include "boost/assign.hpp"
Include dependency graph for parameter-server.hh:
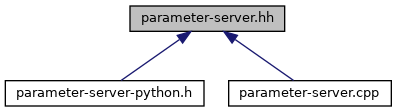
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | dynamicgraph::sot::ParameterServer |
Namespaces | |
| dynamicgraph | |
| dynamicgraph::sot | |
Macros | |
| #define | CTRL_MODE_TRANSITION_TIME_STEP 1000.0 |
| Number of time step to transition from one ctrl mode to another. More... | |
| #define | SOTParameterServer_EXPORT |
Macro Definition Documentation
◆ CTRL_MODE_TRANSITION_TIME_STEP
| #define CTRL_MODE_TRANSITION_TIME_STEP 1000.0 |
Number of time step to transition from one ctrl mode to another.
Definition at line 54 of file parameter-server.hh.
◆ SOTParameterServer_EXPORT
| #define SOTParameterServer_EXPORT |
Definition at line 31 of file parameter-server.hh.