Hybrid factor graph that uses type erasure. More...
#include <gtsam/base/utilities.h>#include <gtsam/discrete/Assignment.h>#include <gtsam/discrete/DiscreteEliminationTree.h>#include <gtsam/discrete/DiscreteFactorGraph.h>#include <gtsam/discrete/DiscreteJunctionTree.h>#include <gtsam/discrete/DiscreteKey.h>#include <gtsam/discrete/DiscreteValues.h>#include <gtsam/discrete/TableDistribution.h>#include <gtsam/discrete/TableFactor.h>#include <gtsam/hybrid/HybridConditional.h>#include <gtsam/hybrid/HybridEliminationTree.h>#include <gtsam/hybrid/HybridFactor.h>#include <gtsam/hybrid/HybridGaussianConditional.h>#include <gtsam/hybrid/HybridGaussianFactor.h>#include <gtsam/hybrid/HybridGaussianFactorGraph.h>#include <gtsam/hybrid/HybridJunctionTree.h>#include <gtsam/inference/EliminateableFactorGraph-inst.h>#include <gtsam/inference/Key.h>#include <gtsam/linear/GaussianConditional.h>#include <gtsam/linear/GaussianEliminationTree.h>#include <gtsam/linear/GaussianFactorGraph.h>#include <gtsam/linear/GaussianJunctionTree.h>#include <gtsam/linear/HessianFactor.h>#include <gtsam/linear/JacobianFactor.h>#include <cstddef>#include <iostream>#include <memory>#include <stdexcept>#include <utility>#include <vector>
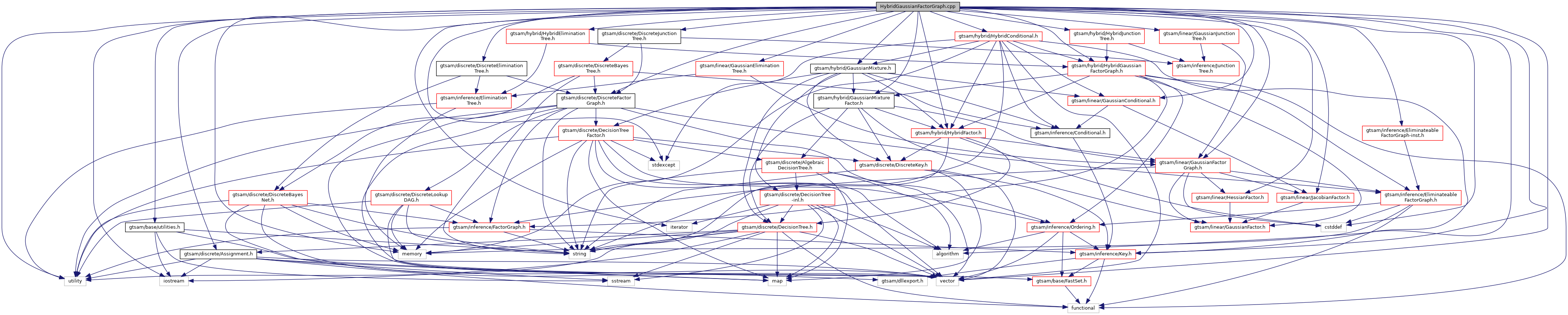
Include dependency graph for HybridGaussianFactorGraph.cpp:
Go to the source code of this file.
Classes | |
| struct | gtsam::Result |
| Result from elimination. More... | |
Namespaces | |
| gtsam | |
| traits | |
Macros | |
| #define | GTSAM_HYBRID_WITH_TABLEFACTOR 1 |
Typedefs | |
| using | gtsam::OrphanWrapper = BayesTreeOrphanWrapper< HybridBayesTree::Clique > |
| using | gtsam::ResultTree = DecisionTree< Key, Result > |
Functions | |
| static DiscreteFactorGraph | gtsam::CollectDiscreteFactors (const HybridGaussianFactorGraph &factors) |
| static std::pair< HybridConditional::shared_ptr, std::shared_ptr< Factor > > | gtsam::continuousElimination (const HybridGaussianFactorGraph &factors, const Ordering &frontalKeys) |
| static std::shared_ptr< Factor > | gtsam::createDiscreteFactor (const ResultTree &eliminationResults, const DiscreteKeys &discreteSeparator) |
| static std::shared_ptr< Factor > | gtsam::createHybridGaussianFactor (const ResultTree &eliminationResults, const DiscreteKeys &discreteSeparator) |
| static std::pair< HybridConditional::shared_ptr, std::shared_ptr< Factor > > | gtsam::discreteElimination (const HybridGaussianFactorGraph &factors, const Ordering &frontalKeys) |
| static DiscreteFactor::shared_ptr | gtsam::DiscreteFactorFromErrors (const DiscreteKeys &discreteKeys, const AlgebraicDecisionTree< Key > &errors) |
| Take negative log-values, shift them so that the minimum value is 0, and then exponentiate to create a TableFactor (not normalized yet!). More... | |
| std::pair< HybridConditional::shared_ptr, std::shared_ptr< Factor > > | gtsam::EliminateHybrid (const HybridGaussianFactorGraph &factors, const Ordering &keys) |
| Main elimination function for HybridGaussianFactorGraph. More... | |
| const Ordering | gtsam::HybridOrdering (const HybridGaussianFactorGraph &graph) |
| Return a Colamd constrained ordering where the discrete keys are eliminated after the continuous keys. More... | |
| static void | gtsam::printFactor (const std::shared_ptr< Factor > &factor, const DiscreteValues &assignment, const KeyFormatter &keyFormatter) |
| static void | gtsam::throwRuntimeError (const std::string &s, const std::shared_ptr< Factor > &f) |
Variables | |
| static auto | gtsam::GetDiscreteKeys |
| Get the discrete keys from the HybridGaussianFactorGraph as DiscreteKeys. More... | |
| static const VectorValues | gtsam::kEmpty |
Detailed Description
Hybrid factor graph that uses type erasure.
- Date
- Mar 11, 2022
Definition in file HybridGaussianFactorGraph.cpp.
Macro Definition Documentation
◆ GTSAM_HYBRID_WITH_TABLEFACTOR
| #define GTSAM_HYBRID_WITH_TABLEFACTOR 1 |
Definition at line 53 of file HybridGaussianFactorGraph.cpp.