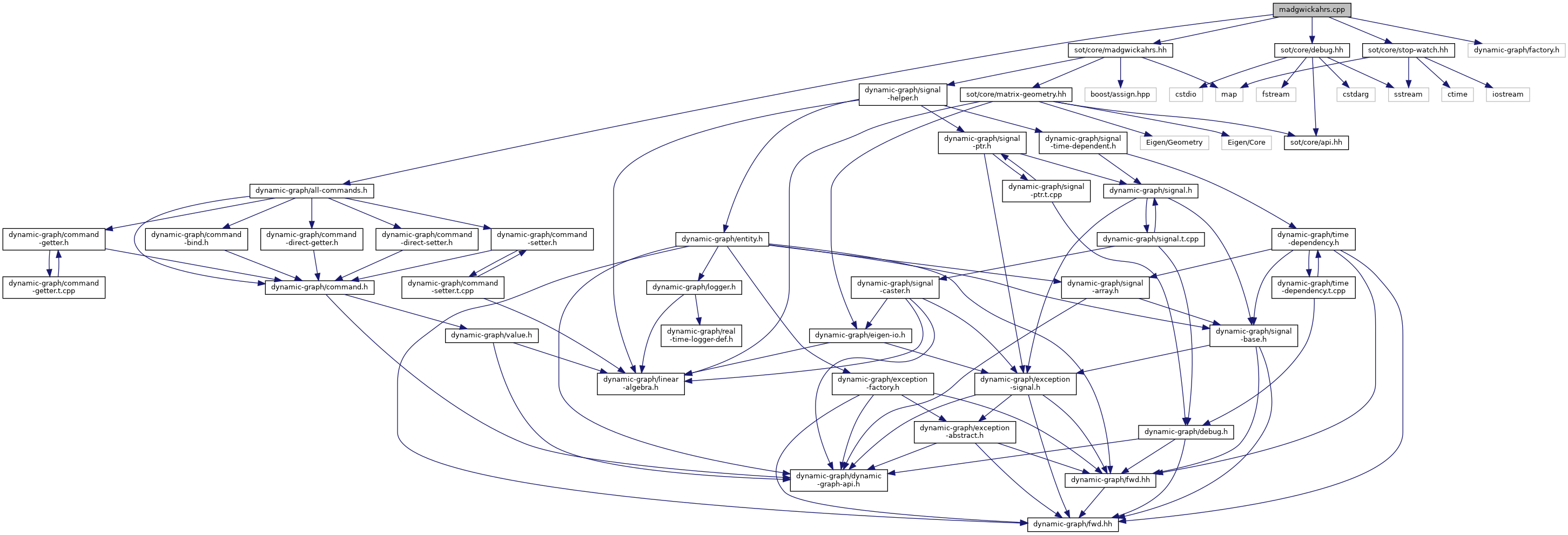
#include <dynamic-graph/all-commands.h>#include <dynamic-graph/factory.h>#include <sot/core/debug.hh>#include <sot/core/madgwickahrs.hh>#include <sot/core/stop-watch.hh>
Include dependency graph for madgwickahrs.cpp:
Go to the source code of this file.
Namespaces | |
| dynamicgraph | |
| dynamicgraph::sot | |
Macros | |
| #define | INPUT_SIGNALS m_accelerometerSIN << m_gyroscopeSIN |
| #define | OUTPUT_SIGNALS m_imu_quatSOUT |
| #define | PROFILE_MADGWICKAHRS_COMPUTATION "MadgwickAHRS computation" |
Typedefs | |
| typedef Vector6d | dynamicgraph::sot::Vector6 |
Functions | |
| dynamicgraph::sot::DEFINE_SIGNAL_OUT_FUNCTION (imu_quat, dynamicgraph::Vector) | |
| dynamicgraph::sot::DYNAMICGRAPH_FACTORY_ENTITY_PLUGIN (MadgwickAHRS, "MadgwickAHRS") | |
Macro Definition Documentation
◆ INPUT_SIGNALS
| #define INPUT_SIGNALS m_accelerometerSIN << m_gyroscopeSIN |
Definition at line 31 of file madgwickahrs.cpp.
◆ OUTPUT_SIGNALS
| #define OUTPUT_SIGNALS m_imu_quatSOUT |
Definition at line 32 of file madgwickahrs.cpp.
◆ PROFILE_MADGWICKAHRS_COMPUTATION
| #define PROFILE_MADGWICKAHRS_COMPUTATION "MadgwickAHRS computation" |
Definition at line 29 of file madgwickahrs.cpp.