#include <GaussianDensity.h>
Public Types | |
| typedef std::shared_ptr< GaussianDensity > | shared_ptr |
 Public Types inherited from gtsam::GaussianConditional Public Types inherited from gtsam::GaussianConditional | |
| typedef Conditional< BaseFactor, This > | BaseConditional |
| Typedef to our conditional base class. More... | |
| typedef JacobianFactor | BaseFactor |
| Typedef to our factor base class. More... | |
| typedef std::shared_ptr< This > | shared_ptr |
| shared_ptr to this class More... | |
| typedef GaussianConditional | This |
| Typedef to this class. More... | |
| Public Types inherited from gtsam::JacobianFactor | |
| typedef VerticalBlockMatrix::Block | ABlock |
| typedef GaussianFactor | Base |
| Typedef to base class. More... | |
| typedef ABlock::ColXpr | BVector |
| typedef VerticalBlockMatrix::constBlock | constABlock |
| typedef constABlock::ConstColXpr | constBVector |
| typedef std::shared_ptr< This > | shared_ptr |
| shared_ptr to this class More... | |
| typedef JacobianFactor | This |
| Typedef to this class. More... | |
| Public Types inherited from gtsam::GaussianFactor | |
| typedef Factor | Base |
| Our base class. More... | |
| typedef std::shared_ptr< This > | shared_ptr |
| shared_ptr to this class More... | |
| typedef GaussianFactor | This |
| This class. More... | |
| Public Types inherited from gtsam::Factor | |
| typedef KeyVector::const_iterator | const_iterator |
| Const iterator over keys. More... | |
| typedef KeyVector::iterator | iterator |
| Iterator over keys. More... | |
| Public Types inherited from gtsam::Conditional< JacobianFactor, GaussianConditional > | |
| typedef std::pair< typename JacobianFactor ::const_iterator, typename JacobianFactor ::const_iterator > | ConstFactorRange |
| typedef ConstFactorRangeIterator | Frontals |
| typedef ConstFactorRangeIterator | Parents |
Public Member Functions | |
| Matrix | covariance () const |
Covariance matrix  . More... . More... | |
| GaussianDensity () | |
| default constructor needed for serialization More... | |
| GaussianDensity (const GaussianConditional &conditional) | |
| Copy constructor from GaussianConditional. More... | |
| GaussianDensity (Key key, const Vector &d, const Matrix &R, const SharedDiagonal &noiseModel=SharedDiagonal()) | |
| constructor using d, R More... | |
| Vector | mean () const |
Mean  . More... . More... | |
| void | print (const std::string &="GaussianDensity", const KeyFormatter &formatter=DefaultKeyFormatter) const override |
| print More... | |
| Public Member Functions inherited from gtsam::GaussianConditional | |
| bool | equals (const GaussianFactor &cg, double tol=1e-9) const override |
| double | logNormalizationConstant () const override |
| double | logProbability (const VectorValues &x) const |
| double | evaluate (const VectorValues &x) const |
| double | operator() (const VectorValues &x) const |
| Evaluate probability density, sugar. More... | |
| VectorValues | solve (const VectorValues &parents) const |
| VectorValues | solveOtherRHS (const VectorValues &parents, const VectorValues &rhs) const |
| void | solveTransposeInPlace (VectorValues &gy) const |
| JacobianFactor::shared_ptr | likelihood (const VectorValues &frontalValues) const |
| JacobianFactor::shared_ptr | likelihood (const Vector &frontal) const |
| VectorValues | sample (std::mt19937_64 *rng) const |
| VectorValues | sample (const VectorValues &parentsValues, std::mt19937_64 *rng) const |
| VectorValues | sample () const |
| Sample, use default rng. More... | |
| VectorValues | sample (const VectorValues &parentsValues) const |
| Sample with given values, use default rng. More... | |
| constABlock | R () const |
| constABlock | S () const |
| constABlock | S (const_iterator it) const |
| const constBVector | d () const |
| double | determinant () const |
| Compute the determinant of the R matrix. More... | |
| double | logDeterminant () const |
| Compute the log determinant of the R matrix. More... | |
| double | logProbability (const HybridValues &x) const override |
| double | evaluate (const HybridValues &x) const override |
| GaussianConditional () | |
| GaussianConditional (Key key, const Vector &d, const Matrix &R, const SharedDiagonal &sigmas=SharedDiagonal()) | |
| GaussianConditional (Key key, const Vector &d, const Matrix &R, Key parent1, const Matrix &S, const SharedDiagonal &sigmas=SharedDiagonal()) | |
| GaussianConditional (Key key, const Vector &d, const Matrix &R, Key parent1, const Matrix &S, Key parent2, const Matrix &T, const SharedDiagonal &sigmas=SharedDiagonal()) | |
| template<typename TERMS > | |
| GaussianConditional (const TERMS &terms, size_t nrFrontals, const Vector &d, const SharedDiagonal &sigmas=SharedDiagonal()) | |
| template<typename KEYS > | |
| GaussianConditional (const KEYS &keys, size_t nrFrontals, const VerticalBlockMatrix &augmentedMatrix, const SharedDiagonal &sigmas=SharedDiagonal()) | |
| Public Member Functions inherited from gtsam::JacobianFactor | |
| Matrix | augmentedInformation () const override |
| Matrix | augmentedJacobian () const override |
| Matrix | augmentedJacobianUnweighted () const |
| GaussianFactor::shared_ptr | clone () const override |
| size_t | cols () const |
| std::pair< std::shared_ptr< GaussianConditional >, shared_ptr > | eliminate (const Ordering &keys) |
| bool | equals (const GaussianFactor &lf, double tol=1e-9) const override |
| assert equality up to a tolerance More... | |
| double | error (const VectorValues &c) const override |
| Vector | error_vector (const VectorValues &c) const |
| const SharedDiagonal & | get_model () const |
| SharedDiagonal & | get_model () |
| constABlock | getA (const_iterator variable) const |
| constABlock | getA () const |
| ABlock | getA (iterator variable) |
| ABlock | getA () |
| const constBVector | getb () const |
| BVector | getb () |
| DenseIndex | getDim (const_iterator variable) const override |
| Vector | gradient (Key key, const VectorValues &x) const override |
| Compute the gradient wrt a key at any values. More... | |
| VectorValues | gradientAtZero () const override |
| A'*b for Jacobian. More... | |
| void | gradientAtZero (double *d) const override |
| A'*b for Jacobian (raw memory version) More... | |
| std::map< Key, Matrix > | hessianBlockDiagonal () const override |
| Return the block diagonal of the Hessian for this factor. More... | |
| void | hessianDiagonal (double *d) const override |
| Raw memory access version of hessianDiagonal. More... | |
| void | hessianDiagonalAdd (VectorValues &d) const override |
| Add the current diagonal to a VectorValues instance. More... | |
| Matrix | information () const override |
| bool | isConstrained () const |
| std::pair< Matrix, Vector > | jacobian () const override |
| Returns (dense) A,b pair associated with factor, bakes in the weights. More... | |
| JacobianFactor (const GaussianFactor &gf) | |
| JacobianFactor (const JacobianFactor &jf) | |
| JacobianFactor (const HessianFactor &hf) | |
| JacobianFactor () | |
| JacobianFactor (const Vector &b_in) | |
| JacobianFactor (Key i1, const Matrix &A1, const Vector &b, const SharedDiagonal &model=SharedDiagonal()) | |
| JacobianFactor (Key i1, const Matrix &A1, Key i2, const Matrix &A2, const Vector &b, const SharedDiagonal &model=SharedDiagonal()) | |
| JacobianFactor (Key i1, const Matrix &A1, Key i2, const Matrix &A2, Key i3, const Matrix &A3, const Vector &b, const SharedDiagonal &model=SharedDiagonal()) | |
| template<typename TERMS > | |
| JacobianFactor (const TERMS &terms, const Vector &b, const SharedDiagonal &model=SharedDiagonal()) | |
| template<typename KEYS > | |
| JacobianFactor (const KEYS &keys, const VerticalBlockMatrix &augmentedMatrix, const SharedDiagonal &sigmas=SharedDiagonal()) | |
| JacobianFactor (const GaussianFactorGraph &graph) | |
| JacobianFactor (const GaussianFactorGraph &graph, const VariableSlots &p_variableSlots) | |
| JacobianFactor (const GaussianFactorGraph &graph, const Ordering &ordering) | |
| JacobianFactor (const GaussianFactorGraph &graph, const Ordering &ordering, const VariableSlots &p_variableSlots) | |
| std::pair< Matrix, Vector > | jacobianUnweighted () const |
| Returns (dense) A,b pair associated with factor, does not bake in weights. More... | |
| const VerticalBlockMatrix & | matrixObject () const |
| VerticalBlockMatrix & | matrixObject () |
| void | multiplyHessianAdd (double alpha, const VectorValues &x, VectorValues &y) const override |
| void | multiplyHessianAdd (double alpha, const double *x, double *y, const std::vector< size_t > &accumulatedDims) const |
| GaussianFactor::shared_ptr | negate () const override |
| Vector | operator* (const VectorValues &x) const |
| void | print (const std::string &s="", const KeyFormatter &formatter=DefaultKeyFormatter) const override |
| print with optional string More... | |
| size_t | rows () const |
| void | setModel (bool anyConstrained, const Vector &sigmas) |
| std::shared_ptr< GaussianConditional > | splitConditional (size_t nrFrontals) |
| void | transposeMultiplyAdd (double alpha, const Vector &e, VectorValues &x) const |
| Vector | unweighted_error (const VectorValues &c) const |
| void | updateHessian (const KeyVector &keys, SymmetricBlockMatrix *info) const override |
| JacobianFactor | whiten () const |
| ~JacobianFactor () override | |
| Public Member Functions inherited from gtsam::GaussianFactor | |
| GaussianFactor () | |
| template<typename CONTAINER > | |
| GaussianFactor (const CONTAINER &keys) | |
| double | error (const HybridValues &c) const override |
| VectorValues | hessianDiagonal () const |
| Return the diagonal of the Hessian for this factor. More... | |
| Public Member Functions inherited from gtsam::Factor | |
| virtual | ~Factor ()=default |
| Default destructor. More... | |
| bool | empty () const |
| Whether the factor is empty (involves zero variables). More... | |
| Key | front () const |
| First key. More... | |
| Key | back () const |
| Last key. More... | |
| const_iterator | find (Key key) const |
| find More... | |
| const KeyVector & | keys () const |
| Access the factor's involved variable keys. More... | |
| const_iterator | begin () const |
| const_iterator | end () const |
| size_t | size () const |
| virtual void | printKeys (const std::string &s="Factor", const KeyFormatter &formatter=DefaultKeyFormatter) const |
| print only keys More... | |
| bool | equals (const This &other, double tol=1e-9) const |
| check equality More... | |
| KeyVector & | keys () |
| iterator | begin () |
| iterator | end () |
| Public Member Functions inherited from gtsam::Conditional< JacobianFactor, GaussianConditional > | |
| void | print (const std::string &s="Conditional", const KeyFormatter &formatter=DefaultKeyFormatter) const |
| bool | equals (const This &c, double tol=1e-9) const |
| virtual | ~Conditional () |
| size_t | nrFrontals () const |
| size_t | nrParents () const |
| Key | firstFrontalKey () const |
| Frontals | frontals () const |
| Parents | parents () const |
| double | operator() (const HybridValues &x) const |
| Evaluate probability density, sugar. More... | |
| double | normalizationConstant () const |
| size_t & | nrFrontals () |
| JacobianFactor ::const_iterator | beginFrontals () const |
| JacobianFactor ::iterator | beginFrontals () |
| JacobianFactor ::const_iterator | endFrontals () const |
| JacobianFactor ::iterator | endFrontals () |
| JacobianFactor ::const_iterator | beginParents () const |
| JacobianFactor ::iterator | beginParents () |
| JacobianFactor ::const_iterator | endParents () const |
| JacobianFactor ::iterator | endParents () |
Static Public Member Functions | |
| static GaussianDensity | FromMeanAndStddev (Key key, const Vector &mean, double sigma) |
| Construct using a mean and standard deviation. More... | |
| Static Public Member Functions inherited from gtsam::GaussianConditional | |
| static GaussianConditional | FromMeanAndStddev (Key key, const Vector &mu, double sigma) |
Construct from mean mu and standard deviation sigma. More... | |
| static GaussianConditional | FromMeanAndStddev (Key key, const Matrix &A, Key parent, const Vector &b, double sigma) |
Construct from conditional mean A1 p1 + b and standard deviation. More... | |
| static GaussianConditional | FromMeanAndStddev (Key key, const Matrix &A1, Key parent1, const Matrix &A2, Key parent2, const Vector &b, double sigma) |
| template<typename... Args> | |
| static shared_ptr | sharedMeanAndStddev (Args &&... args) |
| Create shared pointer by forwarding arguments to fromMeanAndStddev. More... | |
| template<typename ITERATOR > | |
| static shared_ptr | Combine (ITERATOR firstConditional, ITERATOR lastConditional) |
| Static Public Member Functions inherited from gtsam::GaussianFactor | |
| template<typename CONTAINER > | |
| static DenseIndex | Slot (const CONTAINER &keys, Key key) |
| Static Public Member Functions inherited from gtsam::Conditional< JacobianFactor, GaussianConditional > | |
| static bool | CheckInvariants (const GaussianConditional &conditional, const VALUES &x) |
Additional Inherited Members | |
| Protected Member Functions inherited from gtsam::JacobianFactor | |
| template<typename TERMS > | |
| void | fillTerms (const TERMS &terms, const Vector &b, const SharedDiagonal &noiseModel) |
| Internal function to fill blocks and set dimensions. More... | |
| Protected Member Functions inherited from gtsam::Factor | |
| Factor () | |
| template<typename CONTAINER > | |
| Factor (const CONTAINER &keys) | |
| template<typename ITERATOR > | |
| Factor (ITERATOR first, ITERATOR last) | |
| Protected Member Functions inherited from gtsam::Conditional< JacobianFactor, GaussianConditional > | |
| Conditional () | |
| Conditional (size_t nrFrontals) | |
| Static Protected Member Functions inherited from gtsam::Factor | |
| template<typename CONTAINER > | |
| static Factor | FromKeys (const CONTAINER &keys) |
| template<typename ITERATOR > | |
| static Factor | FromIterators (ITERATOR first, ITERATOR last) |
| Protected Attributes inherited from gtsam::JacobianFactor | |
| VerticalBlockMatrix | Ab_ |
| noiseModel::Diagonal::shared_ptr | model_ |
| Protected Attributes inherited from gtsam::Factor | |
| KeyVector | keys_ |
| The keys involved in this factor. More... | |
| Protected Attributes inherited from gtsam::Conditional< JacobianFactor, GaussianConditional > | |
| size_t | nrFrontals_ |
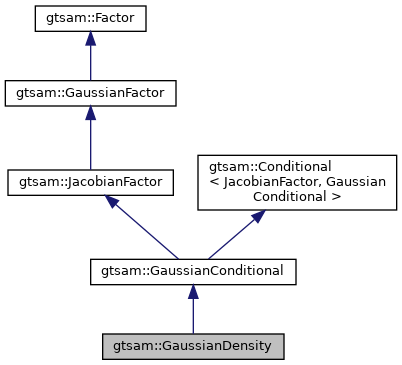
Detailed Description
A GaussianDensity is a GaussianConditional without parents. The negative log-probability is given by  with
with  and
and
Definition at line 32 of file GaussianDensity.h.
Member Typedef Documentation
◆ shared_ptr
| typedef std::shared_ptr<GaussianDensity> gtsam::GaussianDensity::shared_ptr |
Definition at line 36 of file GaussianDensity.h.
Constructor & Destructor Documentation
◆ GaussianDensity() [1/3]
|
inline |
default constructor needed for serialization
Definition at line 39 of file GaussianDensity.h.
◆ GaussianDensity() [2/3]
|
inline |
Copy constructor from GaussianConditional.
Definition at line 44 of file GaussianDensity.h.
◆ GaussianDensity() [3/3]
|
inline |
constructor using d, R
Definition at line 51 of file GaussianDensity.h.
Member Function Documentation
◆ covariance()
| Matrix gtsam::GaussianDensity::covariance | ( | ) | const |
Covariance matrix .
Definition at line 55 of file GaussianDensity.cpp.
◆ FromMeanAndStddev()
|
static |
Construct using a mean and standard deviation.
Definition at line 29 of file GaussianDensity.cpp.
◆ mean()
| Vector gtsam::GaussianDensity::mean | ( | ) | const |
Mean .
Definition at line 49 of file GaussianDensity.cpp.
◆ print()
|
overridevirtual |
Reimplemented from gtsam::GaussianConditional.
Definition at line 36 of file GaussianDensity.cpp.
The documentation for this class was generated from the following files: