#include <GaussianFactor.h>
Public Types | |
| typedef Factor | Base |
| Our base class. More... | |
| typedef std::shared_ptr< This > | shared_ptr |
| shared_ptr to this class More... | |
| typedef GaussianFactor | This |
| This class. More... | |
 Public Types inherited from gtsam::Factor Public Types inherited from gtsam::Factor | |
| typedef KeyVector::const_iterator | const_iterator |
| Const iterator over keys. More... | |
| typedef KeyVector::iterator | iterator |
| Iterator over keys. More... | |
Public Member Functions | |
Standard Constructors | |
| GaussianFactor () | |
| template<typename CONTAINER > | |
| GaussianFactor (const CONTAINER &keys) | |
Testable | |
| void | print (const std::string &s="", const KeyFormatter &formatter=DefaultKeyFormatter) const override=0 |
| print with optional string More... | |
| virtual bool | equals (const GaussianFactor &lf, double tol=1e-9) const =0 |
| assert equality up to a tolerance More... | |
Standard Interface | |
| virtual double | error (const VectorValues &c) const |
| double | error (const HybridValues &c) const override |
| virtual DenseIndex | getDim (const_iterator variable) const =0 |
| virtual Matrix | augmentedJacobian () const =0 |
| virtual std::pair< Matrix, Vector > | jacobian () const =0 |
| virtual Matrix | augmentedInformation () const =0 |
| virtual Matrix | information () const =0 |
| VectorValues | hessianDiagonal () const |
| Return the diagonal of the Hessian for this factor. More... | |
| virtual void | hessianDiagonalAdd (VectorValues &d) const =0 |
| Add the current diagonal to a VectorValues instance. More... | |
| virtual void | hessianDiagonal (double *d) const =0 |
| Raw memory access version of hessianDiagonal. More... | |
| virtual std::map< Key, Matrix > | hessianBlockDiagonal () const =0 |
| Return the block diagonal of the Hessian for this factor. More... | |
| virtual GaussianFactor::shared_ptr | clone () const =0 |
| virtual GaussianFactor::shared_ptr | negate () const =0 |
| virtual void | updateHessian (const KeyVector &keys, SymmetricBlockMatrix *info) const =0 |
Operator interface | |
| virtual void | multiplyHessianAdd (double alpha, const VectorValues &x, VectorValues &y) const =0 |
| y += alpha * A'*A*x More... | |
| virtual VectorValues | gradientAtZero () const =0 |
| A'*b for Jacobian, eta for Hessian. More... | |
| virtual void | gradientAtZero (double *d) const =0 |
| Raw memory access version of gradientAtZero. More... | |
| virtual Vector | gradient (Key key, const VectorValues &x) const =0 |
| Gradient wrt a key at any values. More... | |
| Public Member Functions inherited from gtsam::Factor | |
| virtual | ~Factor ()=default |
| Default destructor. More... | |
| bool | empty () const |
| Whether the factor is empty (involves zero variables). More... | |
| Key | front () const |
| First key. More... | |
| Key | back () const |
| Last key. More... | |
| const_iterator | find (Key key) const |
| find More... | |
| const KeyVector & | keys () const |
| Access the factor's involved variable keys. More... | |
| const_iterator | begin () const |
| const_iterator | end () const |
| size_t | size () const |
| virtual void | printKeys (const std::string &s="Factor", const KeyFormatter &formatter=DefaultKeyFormatter) const |
| print only keys More... | |
| bool | equals (const This &other, double tol=1e-9) const |
| check equality More... | |
| KeyVector & | keys () |
| iterator | begin () |
| iterator | end () |
Static Public Member Functions | |
Advanced Interface | |
| template<typename CONTAINER > | |
| static DenseIndex | Slot (const CONTAINER &keys, Key key) |
Additional Inherited Members | |
| Protected Member Functions inherited from gtsam::Factor | |
| Factor () | |
| template<typename CONTAINER > | |
| Factor (const CONTAINER &keys) | |
| template<typename ITERATOR > | |
| Factor (ITERATOR first, ITERATOR last) | |
| Static Protected Member Functions inherited from gtsam::Factor | |
| template<typename CONTAINER > | |
| static Factor | FromKeys (const CONTAINER &keys) |
| template<typename ITERATOR > | |
| static Factor | FromIterators (ITERATOR first, ITERATOR last) |
| Protected Attributes inherited from gtsam::Factor | |
| KeyVector | keys_ |
| The keys involved in this factor. More... | |
Detailed Description
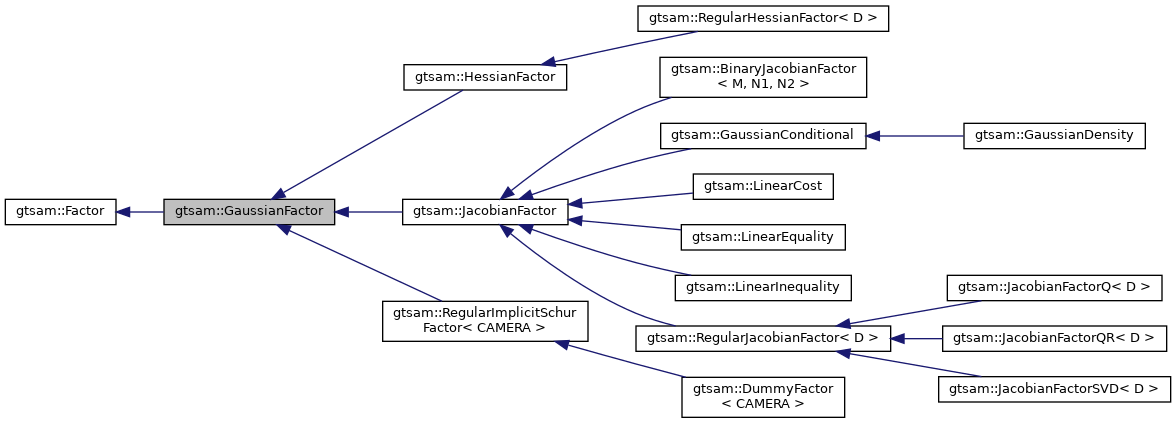
An abstract virtual base class for JacobianFactor and HessianFactor. A GaussianFactor has a quadratic error function. GaussianFactor is non-mutable (all methods const!). The factor value is exp(-0.5*||Ax-b||^2)
Definition at line 38 of file GaussianFactor.h.
Member Typedef Documentation
◆ Base
| typedef Factor gtsam::GaussianFactor::Base |
Our base class.
Definition at line 43 of file GaussianFactor.h.
◆ shared_ptr
| typedef std::shared_ptr<This> gtsam::GaussianFactor::shared_ptr |
shared_ptr to this class
Definition at line 42 of file GaussianFactor.h.
◆ This
This class.
Definition at line 41 of file GaussianFactor.h.
Constructor & Destructor Documentation
◆ GaussianFactor() [1/2]
|
inline |
Default constructor creates empty factor
Definition at line 49 of file GaussianFactor.h.
◆ GaussianFactor() [2/2]
|
inline |
Construct from container of keys. This constructor is used internally from derived factor constructors, either from a container of keys or from a boost::assign::list_of.
Definition at line 54 of file GaussianFactor.h.
Member Function Documentation
◆ augmentedInformation()
|
pure virtual |
Return the augmented information matrix represented by this GaussianFactor. The augmented information matrix contains the information matrix with an additional column holding the information vector, and an additional row holding the transpose of the information vector. The lower-right entry contains the constant error term (when  ). The augmented information matrix is described in more detail in HessianFactor, which in fact stores an augmented information matrix.
). The augmented information matrix is described in more detail in HessianFactor, which in fact stores an augmented information matrix.
Implemented in gtsam::HessianFactor, gtsam::JacobianFactor, and gtsam::RegularImplicitSchurFactor< CAMERA >.
◆ augmentedJacobian()
|
pure virtual |
Return a dense ![$ [ \;A\;b\; ] \in \mathbb{R}^{m \times n+1} $](form_433.png) Jacobian matrix, augmented with b with the noise models baked into A and b. The negative log-likelihood is
Jacobian matrix, augmented with b with the noise models baked into A and b. The negative log-likelihood is  . See also GaussianFactorGraph::jacobian and GaussianFactorGraph::sparseJacobian.
. See also GaussianFactorGraph::jacobian and GaussianFactorGraph::sparseJacobian.
Implemented in gtsam::HessianFactor, gtsam::JacobianFactor, and gtsam::RegularImplicitSchurFactor< CAMERA >.
◆ clone()
|
pure virtual |
Clone a factor (make a deep copy)
Implemented in gtsam::RegularImplicitSchurFactor< CAMERA >, gtsam::JacobianFactor, gtsam::HessianFactor, gtsam::LinearInequality, gtsam::LinearEquality, gtsam::LinearCost, and gtsam::DummyFactor< CAMERA >.
◆ equals()
|
pure virtual |
assert equality up to a tolerance
Implemented in gtsam::JacobianFactor, gtsam::HessianFactor, gtsam::GaussianConditional, gtsam::RegularImplicitSchurFactor< CAMERA >, gtsam::LinearInequality, gtsam::LinearEquality, and gtsam::LinearCost.
◆ error() [1/2]
|
virtual |
Reimplemented in gtsam::RegularImplicitSchurFactor< CAMERA >, gtsam::JacobianFactor, gtsam::HessianFactor, gtsam::LinearInequality, gtsam::LinearEquality, and gtsam::LinearCost.
Definition at line 27 of file GaussianFactor.cpp.
◆ error() [2/2]
|
overridevirtual |
All factor types need to implement an error function. In factor graphs, this is the negative log-likelihood.
Reimplemented from gtsam::Factor.
Definition at line 31 of file GaussianFactor.cpp.
◆ getDim()
|
pure virtual |
Return the dimension of the variable pointed to by the given key iterator
Implemented in gtsam::JacobianFactor, gtsam::HessianFactor, and gtsam::RegularImplicitSchurFactor< CAMERA >.
◆ gradient()
|
pure virtual |
Gradient wrt a key at any values.
Implemented in gtsam::RegularImplicitSchurFactor< CAMERA >, gtsam::JacobianFactor, and gtsam::HessianFactor.
◆ gradientAtZero() [1/2]
|
pure virtual |
A'*b for Jacobian, eta for Hessian.
Implemented in gtsam::RegularImplicitSchurFactor< CAMERA >, gtsam::JacobianFactor, gtsam::HessianFactor, and gtsam::RegularJacobianFactor< D >.
◆ gradientAtZero() [2/2]
|
pure virtual |
Raw memory access version of gradientAtZero.
Implemented in gtsam::RegularImplicitSchurFactor< CAMERA >, gtsam::JacobianFactor, gtsam::HessianFactor, gtsam::RegularHessianFactor< D >, and gtsam::RegularJacobianFactor< D >.
◆ hessianBlockDiagonal()
Return the block diagonal of the Hessian for this factor.
Implemented in gtsam::HessianFactor, gtsam::JacobianFactor, and gtsam::RegularImplicitSchurFactor< CAMERA >.
◆ hessianDiagonal() [1/2]
| VectorValues GaussianFactor::hessianDiagonal | ( | ) | const |
Return the diagonal of the Hessian for this factor.
Definition at line 35 of file GaussianFactor.cpp.
◆ hessianDiagonal() [2/2]
|
pure virtual |
Raw memory access version of hessianDiagonal.
Implemented in gtsam::HessianFactor, gtsam::JacobianFactor, gtsam::RegularImplicitSchurFactor< CAMERA >, gtsam::RegularHessianFactor< D >, and gtsam::RegularJacobianFactor< D >.
◆ hessianDiagonalAdd()
|
pure virtual |
Add the current diagonal to a VectorValues instance.
Implemented in gtsam::HessianFactor, gtsam::JacobianFactor, and gtsam::RegularImplicitSchurFactor< CAMERA >.
◆ information()
|
pure virtual |
Return the non-augmented information matrix represented by this GaussianFactor.
Implemented in gtsam::HessianFactor, gtsam::JacobianFactor, and gtsam::RegularImplicitSchurFactor< CAMERA >.
◆ jacobian()
Return the dense Jacobian  and right-hand-side
and right-hand-side  , with the noise models baked into A and b. The negative log-likelihood is . See also GaussianFactorGraph::augmentedJacobian and GaussianFactorGraph::sparseJacobian.
, with the noise models baked into A and b. The negative log-likelihood is . See also GaussianFactorGraph::augmentedJacobian and GaussianFactorGraph::sparseJacobian.
Implemented in gtsam::HessianFactor, gtsam::JacobianFactor, and gtsam::RegularImplicitSchurFactor< CAMERA >.
◆ multiplyHessianAdd()
|
pure virtual |
y += alpha * A'*A*x
Implemented in gtsam::RegularImplicitSchurFactor< CAMERA >, gtsam::HessianFactor, gtsam::JacobianFactor, gtsam::RegularHessianFactor< D >, and gtsam::RegularJacobianFactor< D >.
◆ negate()
|
pure virtual |
Construct the corresponding anti-factor to negate information stored stored in this factor.
- Returns
- a HessianFactor with negated Hessian matrices
Implemented in gtsam::JacobianFactor, gtsam::RegularImplicitSchurFactor< CAMERA >, and gtsam::HessianFactor.
◆ print()
|
overridepure virtual |
print with optional string
Reimplemented from gtsam::Factor.
Implemented in gtsam::JacobianFactor, gtsam::HessianFactor, gtsam::GaussianConditional, gtsam::LinearInequality, gtsam::RegularImplicitSchurFactor< CAMERA >, gtsam::LinearEquality, gtsam::LinearCost, gtsam::GaussianDensity, and gtsam::DummyFactor< CAMERA >.
◆ Slot()
|
inlinestatic |
Definition at line 175 of file GaussianFactor.h.
◆ updateHessian()
|
pure virtual |
Update an information matrix by adding the information corresponding to this factor (used internally during elimination).
- Parameters
-
scatter A mapping from variable index to slot index in this HessianFactor info The information matrix to be updated
Implemented in gtsam::HessianFactor, gtsam::JacobianFactor, gtsam::RegularImplicitSchurFactor< CAMERA >, and gtsam::BinaryJacobianFactor< M, N1, N2 >.
The documentation for this class was generated from the following files: