This example runs triangulation several times using 3 different approaches: LOST, DLT, and DLT with optimization. It reports the covariance and the runtime for each approach. More...
#include <gtsam/geometry/Cal3_S2.h>#include <gtsam/geometry/PinholeCamera.h>#include <gtsam/geometry/Point2.h>#include <gtsam/geometry/Point3.h>#include <gtsam/geometry/Pose3.h>#include <gtsam/geometry/Rot3.h>#include <gtsam/geometry/triangulation.h>#include <chrono>#include <iostream>#include <random>#include <optional>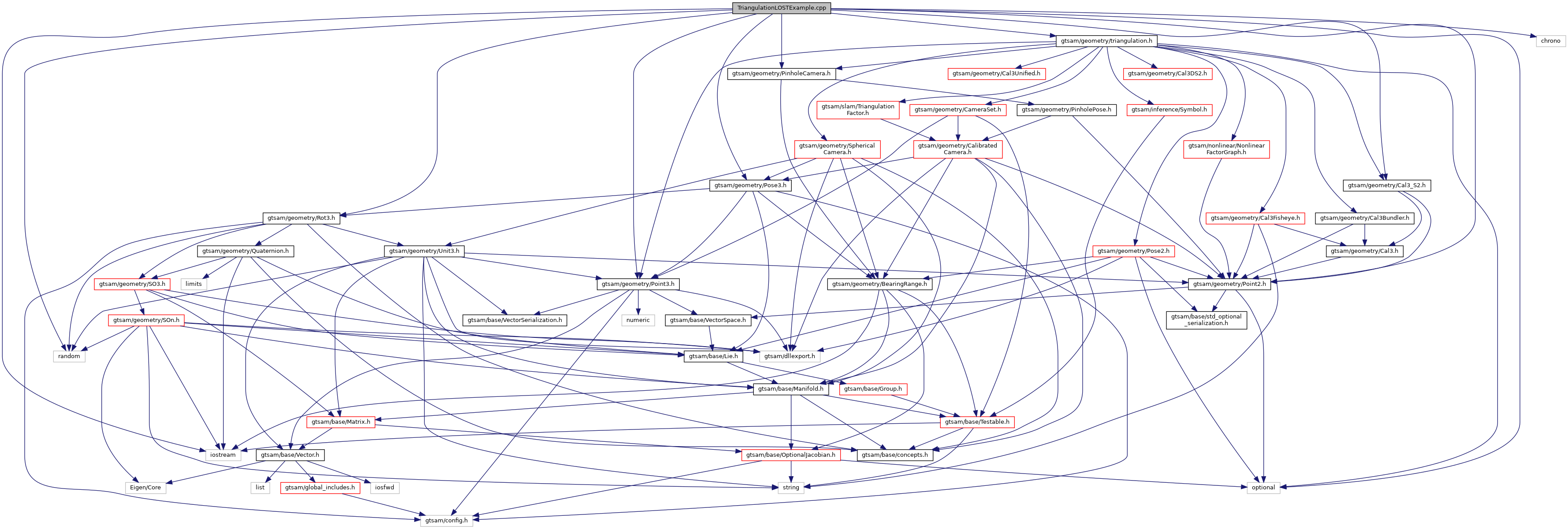
Go to the source code of this file.
Functions | |
| Point2Vector | AddNoiseToMeasurements (const Point2Vector &measurements, const double measurementSigma) |
| void | GetLargeCamerasDataset (CameraSet< PinholeCamera< Cal3_S2 >> *cameras, std::vector< Pose3 > *poses, Point3 *point, Point2Vector *measurements) |
| void | GetSmallCamerasDataset (CameraSet< PinholeCamera< Cal3_S2 >> *cameras, std::vector< Pose3 > *poses, Point3 *point, Point2Vector *measurements) |
| int | main (int argc, char *argv[]) |
| void | PrintCovarianceStats (const Matrix &mat, const std::string &method) |
| void | PrintDuration (const std::chrono::nanoseconds dur, double num_samples, const std::string &method) |
| static std::mt19937 | rng (42) |
Detailed Description
This example runs triangulation several times using 3 different approaches: LOST, DLT, and DLT with optimization. It reports the covariance and the runtime for each approach.
- Date
- 2022-07-10
Definition in file TriangulationLOSTExample.cpp.
Function Documentation
◆ AddNoiseToMeasurements()
| Point2Vector AddNoiseToMeasurements | ( | const Point2Vector & | measurements, |
| const double | measurementSigma | ||
| ) |
Definition at line 95 of file TriangulationLOSTExample.cpp.
◆ GetLargeCamerasDataset()
| void GetLargeCamerasDataset | ( | CameraSet< PinholeCamera< Cal3_S2 >> * | cameras, |
| std::vector< Pose3 > * | poses, | ||
| Point3 * | point, | ||
| Point2Vector * | measurements | ||
| ) |
Definition at line 54 of file TriangulationLOSTExample.cpp.
◆ GetSmallCamerasDataset()
| void GetSmallCamerasDataset | ( | CameraSet< PinholeCamera< Cal3_S2 >> * | cameras, |
| std::vector< Pose3 > * | poses, | ||
| Point3 * | point, | ||
| Point2Vector * | measurements | ||
| ) |
Definition at line 79 of file TriangulationLOSTExample.cpp.
◆ main()
Definition at line 108 of file TriangulationLOSTExample.cpp.
◆ PrintCovarianceStats()
| void PrintCovarianceStats | ( | const Matrix & | mat, |
| const std::string & | method | ||
| ) |
Definition at line 39 of file TriangulationLOSTExample.cpp.
◆ PrintDuration()
| void PrintDuration | ( | const std::chrono::nanoseconds | dur, |
| double | num_samples, | ||
| const std::string & | method | ||
| ) |
Definition at line 47 of file TriangulationLOSTExample.cpp.
◆ rng()
|
static |