#include <vector>#include <sstream>#include "youbot_driver/generic/Logger.hpp"#include "youbot_driver/generic/Units.hpp"#include "youbot_driver/generic/Time.hpp"#include "youbot_driver/generic/Exceptions.hpp"#include "youbot_driver/generic-joint/JointParameter.hpp"#include "youbot_driver/youbot/ProtocolDefinitions.hpp"#include "youbot_driver/youbot/YouBotSlaveMsg.hpp"#include "youbot_driver/youbot/YouBotSlaveMailboxMsg.hpp"#include "youbot_driver/youbot/YouBotJointStorage.hpp"
Include dependency graph for YouBotJointParameterReadOnly.hpp:

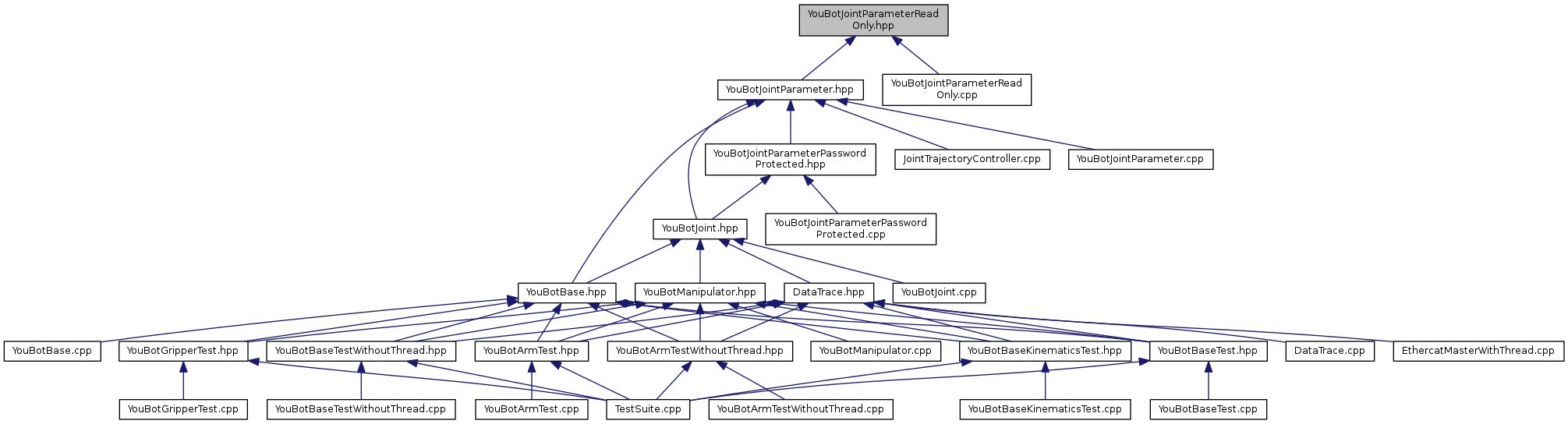
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | youbot::ActualModuleSupplyCurrent |
| Get actual supply current of the module. More... | |
| class | youbot::ActualMotorDriverTemperature |
| Actual temperature of the motor driver. More... | |
| class | youbot::ActualMotorVoltage |
| Actual supply voltage. More... | |
| class | youbot::CurrentError |
| Actual error of current PID regulator. More... | |
| class | youbot::CurrentErrorSum |
| Sum of errors of current PID regulator. More... | |
| class | youbot::ErrorAndStatus |
| class | youbot::I2tSum |
| Actual sum of the I2t monitor. More... | |
| class | youbot::PositionError |
| Actual error of PID position regulator. More... | |
| class | youbot::PositionErrorSum |
| Sums of errors of PID position regulator. More... | |
| class | youbot::RampGeneratorSpeed |
| The actual speed of the velocity ramp used for positioning and velocity mode. More... | |
| class | youbot::VelocityError |
| Actual error of PID velocity regulator. More... | |
| class | youbot::VelocityErrorSum |
| Sums of Errors of PID velocity regulator. More... | |
| class | youbot::YouBotJointParameterReadOnly |
| abstract youBot joint parameter which can be read only More... | |
Namespaces | |
| youbot | |