Defines the Grid map. More...
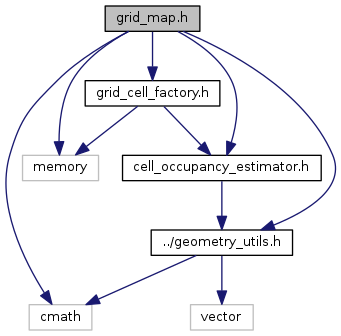
#include <memory>#include <cmath>#include "cell_occupancy_estimator.h"#include "grid_cell_factory.h"#include "../geometry_utils.h"
Include dependency graph for grid_map.h:
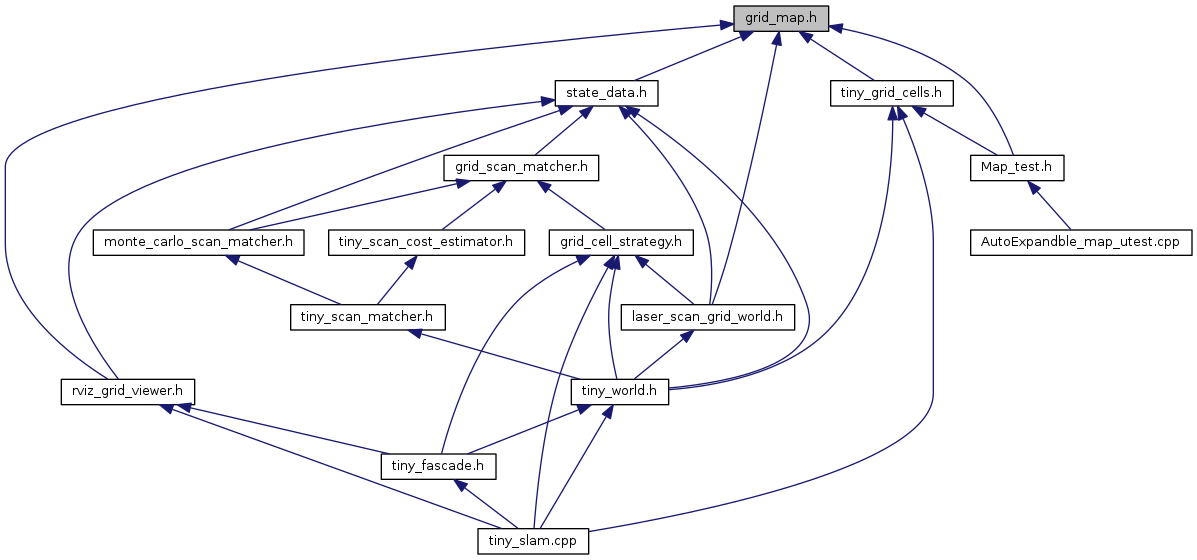
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | GridMap |
| An occupancy grid implementation. More... | |
| struct | GridMapParams |
Macros | |
| #define | COL_IND(cell_coord) ((cell_coord).x + _map_center_x) |
| #define | METERS_TO_CELLS(var) std::floor((var)/_m_per_cell) |
| #define | RESIZE_DIR(DIM, DIR) (((DIM) << RESIZE_DIM_BIT) | ((DIR) << RESIZE_DIR_BIT)) |
| #define | ROW_IND(cell_coord) ((cell_coord).y + _map_center_y) |
Detailed Description
Defines the Grid map.
Definition in file grid_map.h.
Macro Definition Documentation
| #define COL_IND | ( | cell_coord | ) | ((cell_coord).x + _map_center_x) |
Definition at line 65 of file grid_map.h.
| #define METERS_TO_CELLS | ( | var | ) | std::floor((var)/_m_per_cell) |
| #define RESIZE_DIR | ( | DIM, | |
| DIR | |||
| ) | (((DIM) << RESIZE_DIM_BIT) | ((DIR) << RESIZE_DIR_BIT)) |
Definition at line 146 of file grid_map.h.
| #define ROW_IND | ( | cell_coord | ) | ((cell_coord).y + _map_center_y) |
Definition at line 67 of file grid_map.h.