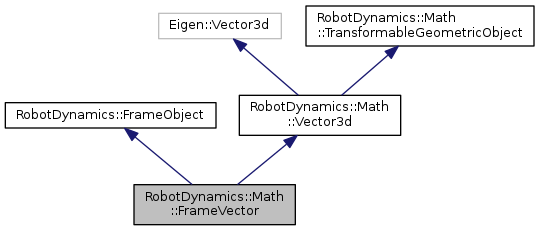
A FrameVector is a 3D vector with a ReferenceFrame, and all operations between FrameVectors and other frame objects will perform runtime checks that objects are expressed in the same frames. This class and its implementation are an adaptation of FrameVector.java by Jerry Pratt and the IHMC Robotics Group. More...
#include <FrameVector.hpp>
Public Member Functions | |
| FrameVector | changeFrameAndCopy (ReferenceFramePtr referenceFrame) const |
| copy into new frame vector and change the frame of that More... | |
| FrameVector | cross (const FrameVector &vector) const |
Cross product between two FrameVectors, i.e.  . More... . More... | |
| Vector3d | cross (const Vector3d &vector) const |
| Cross product, i.e. . More... | |
| double | dot (const FrameVector &frameVector) const |
Dot product between two FrameVectors, i.e.  . More... . More... | |
| FrameVector () | |
| Default constructor. Initializes its ReferenceFrame to nullptr. More... | |
| FrameVector (ReferenceFramePtr referenceFrame) | |
| Constructor. More... | |
| FrameVector (ReferenceFramePtr referenceFrame, const double &x, const double &y, const double &z) | |
| Constructor. More... | |
| FrameVector (ReferenceFramePtr referenceFrame, const Eigen::Vector3d &vector) | |
| Constructor. More... | |
| double | getAngleBetweenVectors (const FrameVector &frameVector) const |
Computer the angle between two FrameVectors,  . More... . More... | |
| Math::TransformableGeometricObject * | getTransformableGeometricObject () |
| Return pointer to this object as type TransformableGeometricObject. See FrameObject::changeFrame for an example of where this method is used. More... | |
| template<typename T > | |
| void | operator*= (const T scale) |
Times euals operator that performs runtime frame checks,  . More... . More... | |
| void | operator+= (const Vector3d &v) |
| void | operator+= (const FrameVector &v) |
Plus euals operator that performs runtime frame checks,  . More... . More... | |
| void | operator-= (const Vector3d &v) |
| void | operator-= (const FrameVector &v) |
| Minus euals operator that performs runtime frame checks, . More... | |
| void | setIncludingFrame (const double x, const double y, const double z, ReferenceFramePtr referenceFrame) |
| Set the x, y, and z components and the ReferenceFrame these components are expressed in. More... | |
| void | setIncludingFrame (const Eigen::Vector3d &vector, ReferenceFramePtr referenceFrame) |
| Set the x, y, and z components and the ReferenceFrame these components are expressed in. More... | |
| void | setToZero () |
| Set x, y, and z components to 0. More... | |
| Vector3d | vec () const |
| virtual | ~FrameVector () |
| Destructor. More... | |
 Public Member Functions inherited from RobotDynamics::FrameObject Public Member Functions inherited from RobotDynamics::FrameObject | |
| virtual void | changeFrame (ReferenceFramePtr desiredFrame) |
| Change the ReferenceFrame this FrameObject is expressed in. More... | |
| void | checkReferenceFramesMatch (const FrameObject *frameObject) const |
| Check if two ReferenceFrameHolders hold the same ReferenceFrame. More... | |
| void | checkReferenceFramesMatch (FrameObject *frameObject) const |
| FrameObject (ReferenceFramePtr referenceFrame) | |
| ReferenceFramePtr | getReferenceFrame () const |
| Get a pointer to the reference frame this FrameObject is expressed in. More... | |
| void | setReferenceFrame (ReferenceFramePtr frame) |
| Set frame objects internal reference frame. More... | |
| virtual | ~FrameObject () |
| Destructor. More... | |
| Public Member Functions inherited from RobotDynamics::Math::Vector3d | |
| template<typename OtherDerived > | |
| Vector3d & | operator= (const Eigen::MatrixBase< OtherDerived > &other) |
| void | set (const Eigen::Vector3d &v) |
| void | set (const double &v0, const double &v1, const double &v2) |
| void | transform (const RobotDynamics::Math::SpatialTransform &X) |
| Pure virtual object. This object forces objects that inherit from it to have a method that tells how that object is transformed. More... | |
| Vector3d | transform_copy (const RobotDynamics::Math::SpatialTransform &X) const |
| template<typename OtherDerived > | |
| Vector3d (const Eigen::MatrixBase< OtherDerived > &other) | |
| EIGEN_STRONG_INLINE | Vector3d () |
| EIGEN_STRONG_INLINE | Vector3d (const double &v0, const double &v1, const double &v2) |
Additional Inherited Members | |
| Public Types inherited from RobotDynamics::Math::Vector3d | |
| typedef Eigen::Vector3d | Base |
| Protected Attributes inherited from RobotDynamics::FrameObject | |
| ReferenceFramePtr | referenceFrame |
Detailed Description
A FrameVector is a 3D vector with a ReferenceFrame, and all operations between FrameVectors and other frame objects will perform runtime checks that objects are expressed in the same frames. This class and its implementation are an adaptation of FrameVector.java by Jerry Pratt and the IHMC Robotics Group.
Definition at line 33 of file FrameVector.hpp.
Constructor & Destructor Documentation
|
inline |
Default constructor. Initializes its ReferenceFrame to nullptr.
Definition at line 39 of file FrameVector.hpp.
|
inlineexplicit |
Constructor.
- Parameters
-
referenceFrame A pointer to a ReferenceFrame
Definition at line 47 of file FrameVector.hpp.
|
inline |
Constructor.
- Parameters
-
referenceFrame A pointer to a ReferenceFrame x Value of the x-coordinate y Value of the y-coordinate z Value of the z-coordinate
Definition at line 58 of file FrameVector.hpp.
|
inline |
Constructor.
- Parameters
-
referenceFrame Pointer to a ReferenceFrame vector A Vector3d used to set the x,y, and z coordinates
Definition at line 67 of file FrameVector.hpp.
|
inlinevirtual |
Destructor.
Definition at line 74 of file FrameVector.hpp.
Member Function Documentation
|
inline |
copy into new frame vector and change the frame of that
- Parameters
-
referenceFrame
- Returns
Definition at line 93 of file FrameVector.hpp.
|
inline |
Cross product between two FrameVectors, i.e. .
- Parameters
-
vector
- Exceptions
-
ReferenceFrameException If the FrameVectors aren't expressed in the same ReferenceFrame
- Returns
- The cross product
Definition at line 163 of file FrameVector.hpp.
Cross product, i.e. .
- Parameters
-
vector
- Returns
- The cross product
Definition at line 175 of file FrameVector.hpp.
|
inline |
Dot product between two FrameVectors, i.e. .
- Parameters
-
frameVector
- Exceptions
-
ReferenceFrameException If the FrameVectors aren't expressed in the same ReferenceFrame
- Returns
- The dot product
Definition at line 150 of file FrameVector.hpp.
|
inline |
Computer the angle between two FrameVectors, .
- Parameters
-
frameVector
- Returns
- The angle between the vectors
Definition at line 185 of file FrameVector.hpp.
|
inlinevirtual |
Return pointer to this object as type TransformableGeometricObject. See FrameObject::changeFrame for an example of where this method is used.
- Returns
- Pointer to this object as type TransformableGeometricObject
Implements RobotDynamics::FrameObject.
Definition at line 83 of file FrameVector.hpp.
|
inline |
Times euals operator that performs runtime frame checks, .
- Template Parameters
-
typename of the scale parameter
- Parameters
-
scale
Definition at line 241 of file FrameVector.hpp.
|
inline |
Definition at line 197 of file FrameVector.hpp.
|
inline |
Plus euals operator that performs runtime frame checks, .
- Parameters
-
v
Definition at line 215 of file FrameVector.hpp.
|
inline |
Definition at line 204 of file FrameVector.hpp.
|
inline |
Minus euals operator that performs runtime frame checks, .
- Parameters
-
v
Definition at line 227 of file FrameVector.hpp.
|
inline |
Set the x, y, and z components and the ReferenceFrame these components are expressed in.
- Parameters
-
x The x-component y y-component z z-component
- Exceptions
-
ReferenceFrameException If *referenceFrame=nullptr
- Parameters
-
referenceFrame Pointer to a ReferenceFrame this point is expressed in
Definition at line 116 of file FrameVector.hpp.
|
inline |
Set the x, y, and z components and the ReferenceFrame these components are expressed in.
- Parameters
-
vector Used to set the x,y, and z components of this point
- Exceptions
-
ReferenceFrameException If *referenceFrame=nullptr
- Parameters
-
referenceFrame Pointer to a ReferenceFrame this point is expressed in
Definition at line 133 of file FrameVector.hpp.
|
inline |
Set x, y, and z components to 0.
Definition at line 103 of file FrameVector.hpp.
|
inline |
Definition at line 192 of file FrameVector.hpp.
The documentation for this class was generated from the following file: