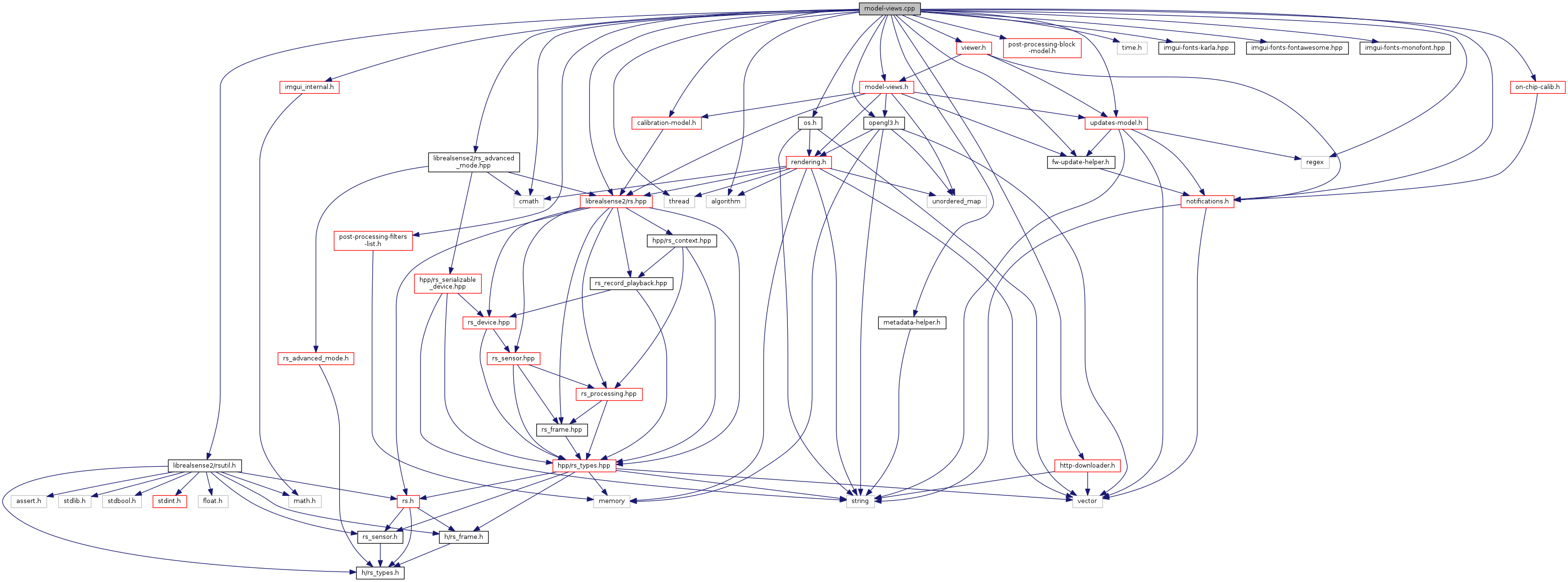
#include <thread>#include <algorithm>#include <regex>#include <cmath>#include <opengl3.h>#include <librealsense2/rs_advanced_mode.hpp>#include <librealsense2/rsutil.h>#include <librealsense2/rs.hpp>#include "model-views.h"#include "updates-model.h"#include "notifications.h"#include "fw-update-helper.h"#include "on-chip-calib.h"#include "viewer.h"#include "post-processing-filters-list.h"#include "post-processing-block-model.h"#include <imgui_internal.h>#include <time.h>#include "imgui-fonts-karla.hpp"#include "imgui-fonts-fontawesome.hpp"#include "imgui-fonts-monofont.hpp"#include "os.h"#include "metadata-helper.h"#include "calibration-model.h"#include "sw-update/http-downloader.h"
Include dependency graph for model-views.cpp:
Go to the source code of this file.
Classes | |
| struct | attribute |
Namespaces | |
| rs2 | |
Functions | |
| void | rs2::bin_file_from_bytes (const std::string &filename, const std::vector< uint8_t > bytes) |
| std::vector< uint8_t > | rs2::bytes_from_bin_file (const std::string &filename) |
| option_model | rs2::create_option_model (rs2_option opt, const std::string &opt_base_label, subdevice_model *model, std::shared_ptr< options > options, bool *options_invalidated, std::string &error_message) |
| bool | rs2::draw_combo_box (const std::string &id, const std::vector< std::string > &device_names, int &new_index) |
| void | rs2::draw_rect (const rect &r, int line_width) |
| void | rs2::export_frame (const std::string &fname, std::unique_ptr< rs2::filter > exporter, notifications_model &ns, frame data, bool notify) |
| ImVec4 | flip (const ImVec4 &c) |
| bool | rs2::frame_metadata_to_csv (const std::string &filename, rs2::frame frame) |
| ImVec4 | from_rgba (uint8_t r, uint8_t g, uint8_t b, uint8_t a, bool consistent_color) |
| bool | rs2::fw_version_less_than (std::string fw_version, std::string min_fw_version) |
| std::vector< int > | rs2::fw_version_to_int_vec (std::string fw_version) |
| std::vector< std::string > | rs2::get_device_info (const device &dev, bool include_location) |
| std::pair< std::string, std::string > | rs2::get_device_name (const device &dev) |
| std::string | rs2::get_device_sensor_name (subdevice_model *sub) |
| std::vector< std::pair< std::string, std::string > > | rs2::get_devices_names (const device_list &list) |
| static int | get_resolution_id_from_sensor_mode (rs2_sensor_mode sensor_mode, const rs2::sensor &s, const std::vector< std::pair< int, int > > &res_values) |
| std::vector< const char * > | rs2::get_string_pointers (const std::vector< std::string > &vec) |
| std::tuple< uint8_t, uint8_t, uint8_t > | rs2::get_texcolor (video_frame texture, texture_coordinate texcoords) |
| void | rs2::hyperlink (ux_window &window, const char *title, const char *link) |
| void | rs2::imgui_easy_theming (ImFont *&font_14, ImFont *&font_18, ImFont *&monofont) |
| bool | rs2::motion_data_to_csv (const std::string &filename, rs2::frame frame) |
| void | rs2::open_issue (std::string body) |
| void | rs2::open_issue (const device_models_list &devices) |
| ImVec4 | operator+ (const ImVec4 &c, float v) |
| void | rs2::outline_rect (const rect &r) |
| bool | rs2::pose_data_to_csv (const std::string &filename, rs2::frame frame) |
| bool | rs2::restore_processing_block (const char *name, std::shared_ptr< rs2::processing_block > pb, bool enable=true) |
| template<typename T > | |
| std::string | rs2::safe_call (T t) |
| bool | rs2::save_frame_raw_data (const std::string &filename, rs2::frame frame) |
| void | rs2::save_processing_block_to_config_file (const char *name, std::shared_ptr< rs2::processing_block > pb, bool enable) |
| bool | rs2::status_dialog (const std::string &title, const std::string &process_topic_text, const std::string &process_status_text, bool enable_close, ux_window &window) |
| static void | width_height_from_resolution (rs2_sensor_mode mode, int &width, int &height) |
| bool | rs2::yes_no_dialog (const std::string &title, const std::string &message_text, bool &approved, ux_window &window, const std::string &error_message, bool disabled, const std::string &disabled_reason) |
Function Documentation
Definition at line 102 of file model-views.cpp.
Definition at line 107 of file model-views.cpp.
|
static |
Definition at line 80 of file model-views.cpp.
Definition at line 116 of file model-views.cpp.
|
static |
Definition at line 58 of file model-views.cpp.