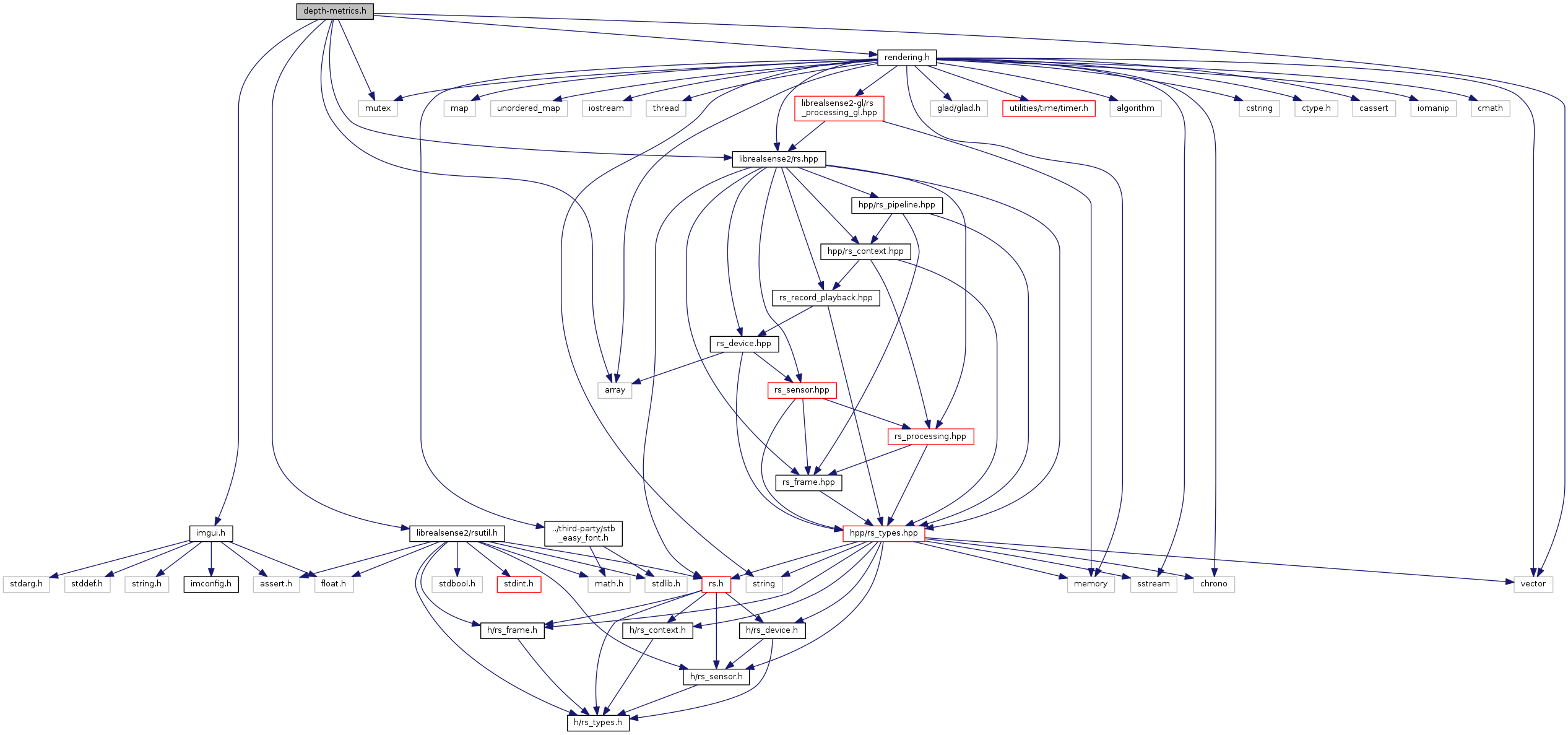
#include <vector>
#include <mutex>
#include <array>
#include <imgui.h>
#include <librealsense2/rsutil.h>
#include <librealsense2/rs.hpp>
#include "rendering.h"
Go to the source code of this file.
|
| using | rs2::depth_quality::callback_type = std::function< void(const std::vector< rs2::float3 > &points, const plane p, const rs2::region_of_interest roi, const float baseline_mm, const float focal_length_pixels, const int ground_thruth_mm, const bool plane_fit, const float plane_fit_to_ground_truth_mm, const float distance_mm, bool record, std::vector< single_metric_data > &samples)> |
| |
|
| snapshot_metrics | rs2::depth_quality::analyze_depth_image (const rs2::video_frame &frame, float units, float baseline_mm, const rs2_intrinsics *intrin, rs2::region_of_interest roi, const int ground_truth_mm, bool plane_fit_present, std::vector< single_metric_data > &samples, bool record, callback_type callback) |
| |
| float3 | rs2::depth_quality::approximate_intersection (const plane &p, const rs2_intrinsics *intrin, float x, float y, float min, float max) |
| |
| float3 | rs2::depth_quality::approximate_intersection (const plane &p, const rs2_intrinsics *intrin, float x, float y) |
| |
| double | rs2::depth_quality::evaluate_pixel (const plane &p, const rs2_intrinsics *intrin, float x, float y, float distance, float3 &output) |
| |
| plane | rs2::depth_quality::plane_from_point_and_normal (const rs2::float3 &point, const rs2::float3 &normal) |
| |
| plane | rs2::depth_quality::plane_from_points (const std::vector< rs2::float3 > points) |
| |