#include <string_relay.h>
Public Types | |
| typedef boost::shared_ptr< StringRelay > | Ptr |
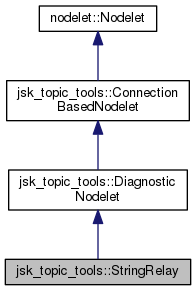
 Public Types inherited from jsk_topic_tools::DiagnosticNodelet Public Types inherited from jsk_topic_tools::DiagnosticNodelet | |
| typedef boost::shared_ptr< DiagnosticNodelet > | Ptr |
Public Member Functions | |
| StringRelay () | |
| Public Member Functions inherited from jsk_topic_tools::DiagnosticNodelet | |
| DiagnosticNodelet (const std::string &name) | |
| Constructor and subclass need to call this. More... | |
| Public Member Functions inherited from jsk_topic_tools::ConnectionBasedNodelet | |
| ConnectionBasedNodelet () | |
| Public Member Functions inherited from nodelet::Nodelet | |
| void | init (const std::string &name, const M_string &remapping_args, const V_string &my_argv, ros::CallbackQueueInterface *st_queue=NULL, ros::CallbackQueueInterface *mt_queue=NULL) |
| Nodelet () | |
| virtual | ~Nodelet () |
Protected Member Functions | |
| virtual void | callback (const std_msgs::String::ConstPtr &msg) |
| virtual void | onInit () |
| Initialize method. Subclass should call this method in its onInit method. More... | |
| virtual void | subscribe () |
| This method is called when publisher is subscribed by other nodes. Set up subscribers in this method. More... | |
| virtual void | unsubscribe () |
| This method is called when publisher is unsubscribed by other nodes. Shut down subscribers in this method. More... | |
| Protected Member Functions inherited from jsk_topic_tools::DiagnosticNodelet | |
| virtual void | updateDiagnostic (diagnostic_updater::DiagnosticStatusWrapper &stat) |
| Method which is called periodically. More... | |
| Protected Member Functions inherited from jsk_topic_tools::ConnectionBasedNodelet | |
| template<class T > | |
| ros::Publisher | advertise (ros::NodeHandle &nh, std::string topic, int queue_size) |
| Advertise a topic and watch the publisher. Publishers which are created by this method. It automatically reads latch boolean parameter from nh and publish topic with appropriate latch parameter. More... | |
| image_transport::CameraPublisher | advertiseCamera (ros::NodeHandle &nh, image_transport::ImageTransport &it, const std::string &topic, int queue_size) |
| image_transport::CameraPublisher | advertiseCamera (ros::NodeHandle &nh, const std::string &topic, int queue_size) |
| image_transport::Publisher | advertiseImage (ros::NodeHandle &nh, image_transport::ImageTransport &it, const std::string &topic, int queue_size) |
| image_transport::Publisher | advertiseImage (ros::NodeHandle &nh, const std::string &topic, int queue_size) |
| Advertise an image topic and watch the publisher. Publishers which are created by this method. It automatically reads latch boolean parameter from nh and it and publish topic with appropriate latch parameter. More... | |
| virtual void | cameraConnectionBaseCallback () |
| callback function which is called when new subscriber come for camera image publisher or camera info publisher. This function is called from cameraConnectionCallback or cameraInfoConnectionCallback. More... | |
| virtual void | cameraConnectionCallback (const image_transport::SingleSubscriberPublisher &pub) |
| callback function which is called when new subscriber come for camera image publisher More... | |
| virtual void | cameraInfoConnectionCallback (const ros::SingleSubscriberPublisher &pub) |
| callback function which is called when new subscriber come for camera info publisher More... | |
| virtual void | connectionCallback (const ros::SingleSubscriberPublisher &pub) |
| callback function which is called when new subscriber come More... | |
| virtual void | imageConnectionCallback (const image_transport::SingleSubscriberPublisher &pub) |
| callback function which is called when new subscriber come for image publisher More... | |
| virtual bool | isSubscribed () |
| Returns true when this nodelet subscribes topics, false otherwise. More... | |
| virtual void | onInitPostProcess () |
| Post processing of initialization of nodelet. You need to call this method in order to use always_subscribe feature. More... | |
| virtual void | warnNeverSubscribedCallback (const ros::WallTimerEvent &event) |
| callback function which is called when walltimer duration run out. More... | |
| virtual void | warnOnInitPostProcessCalledCallback (const ros::WallTimerEvent &event) |
| callback function which is called when walltimer duration run out. More... | |
| Protected Member Functions inherited from nodelet::Nodelet | |
| ros::CallbackQueueInterface & | getMTCallbackQueue () const |
| ros::NodeHandle & | getMTNodeHandle () const |
| ros::NodeHandle & | getMTPrivateNodeHandle () const |
| const V_string & | getMyArgv () const |
| const std::string & | getName () const |
| ros::NodeHandle & | getNodeHandle () const |
| ros::NodeHandle & | getPrivateNodeHandle () const |
| const M_string & | getRemappingArgs () const |
| ros::CallbackQueueInterface & | getSTCallbackQueue () const |
| std::string | getSuffixedName (const std::string &suffix) const |
Protected Attributes | |
| ros::Publisher | pub_ |
| ros::Subscriber | sub_ |
| Protected Attributes inherited from jsk_topic_tools::DiagnosticNodelet | |
| TimeredDiagnosticUpdater::Ptr | diagnostic_updater_ |
| Pointer to TimeredDiagnosticUpdater to call updateDiagnostic(diagnostic_updater::DiagnosticStatusWrapper&) periodically. More... | |
| const std::string | name_ |
| Name of subclass. It is set by constructor and used as Diagnostic method. More... | |
| jsk_topic_tools::VitalChecker::Ptr | vital_checker_ |
| VitalChecker object wihch is used in default configuration. More... | |
| Protected Attributes inherited from jsk_topic_tools::ConnectionBasedNodelet | |
| bool | always_subscribe_ |
| A flag to disable watching mechanism and always subscribe input topics. It can be specified via ~always_subscribe parameter. More... | |
| std::vector< image_transport::CameraPublisher > | camera_publishers_ |
| List of watching camera publishers. More... | |
| boost::mutex | connection_mutex_ |
| mutex to call subscribe() and unsubscribe() in critical section. More... | |
| ConnectionStatus | connection_status_ |
| Status of connection. More... | |
| bool | ever_subscribed_ |
| A flag to check if the node has been ever subscribed or not. More... | |
| std::vector< image_transport::Publisher > | image_publishers_ |
| List of watching image publishers. More... | |
| boost::shared_ptr< ros::NodeHandle > | nh_ |
| Shared pointer to nodehandle. More... | |
| bool | on_init_post_process_called_ |
| Never warning on not calling onInitPostProcess if true. More... | |
| boost::shared_ptr< ros::NodeHandle > | pnh_ |
| Shared pointer to private nodehandle. More... | |
| std::vector< ros::Publisher > | publishers_ |
| List of watching publishers. More... | |
| bool | subscribed_ |
| A flag to check if any publisher is already subscribed or not. More... | |
| ros::WallTimer | timer_warn_never_subscribed_ |
| WallTimer instance for warning about no connection. More... | |
| ros::WallTimer | timer_warn_on_init_post_process_called_ |
| WallTimer instance for warning about no connection. More... | |
| bool | verbose_connection_ |
true if ~verbose_connection or verbose_connection parameter is true. More... | |
Detailed Description
Definition at line 45 of file string_relay.h.
Member Typedef Documentation
Definition at line 48 of file string_relay.h.
Constructor & Destructor Documentation
|
inline |
Definition at line 49 of file string_relay.h.
Member Function Documentation
|
protectedvirtual |
Definition at line 56 of file string_relay_nodelet.cpp.
|
protectedvirtual |
Initialize method. Subclass should call this method in its onInit method.
Reimplemented from jsk_topic_tools::DiagnosticNodelet.
Definition at line 40 of file string_relay_nodelet.cpp.
|
protectedvirtual |
This method is called when publisher is subscribed by other nodes. Set up subscribers in this method.
Implements jsk_topic_tools::ConnectionBasedNodelet.
Definition at line 46 of file string_relay_nodelet.cpp.
|
protectedvirtual |
This method is called when publisher is unsubscribed by other nodes. Shut down subscribers in this method.
Implements jsk_topic_tools::ConnectionBasedNodelet.
Definition at line 51 of file string_relay_nodelet.cpp.
Member Data Documentation
|
protected |
Definition at line 56 of file string_relay.h.
|
protected |
Definition at line 57 of file string_relay.h.
The documentation for this class was generated from the following files: