#include <pointcloud_to_pcd.h>
Public Types | |
| typedef PointCloudToPCDConfig | Config |
 Public Types inherited from pcl_ros::PCLNodelet Public Types inherited from pcl_ros::PCLNodelet | |
| typedef boost::shared_ptr< const std::vector< int > > | IndicesConstPtr |
| typedef boost::shared_ptr< std::vector< int > > | IndicesPtr |
| typedef pcl_msgs::ModelCoefficients | ModelCoefficients |
| typedef ModelCoefficients::ConstPtr | ModelCoefficientsConstPtr |
| typedef ModelCoefficients::Ptr | ModelCoefficientsPtr |
| typedef pcl::PointCloud< pcl::PointXYZ > | PointCloud |
| typedef sensor_msgs::PointCloud2 | PointCloud2 |
| typedef PointCloud::ConstPtr | PointCloudConstPtr |
| typedef PointCloud::Ptr | PointCloudPtr |
| typedef pcl_msgs::PointIndices | PointIndices |
| typedef PointIndices::ConstPtr | PointIndicesConstPtr |
| typedef PointIndices::Ptr | PointIndicesPtr |
Public Member Functions | |
| virtual | ~PointCloudToPCD () |
| Public Member Functions inherited from pcl_ros::PCLNodelet | |
| PCLNodelet () | |
| Public Member Functions inherited from nodelet_topic_tools::NodeletLazy | |
| NodeletLazy () | |
| Public Member Functions inherited from nodelet::Nodelet | |
| void | init (const std::string &name, const M_string &remapping_args, const V_string &my_argv, ros::CallbackQueueInterface *st_queue=NULL, ros::CallbackQueueInterface *mt_queue=NULL) |
| Nodelet () | |
| virtual | ~Nodelet () |
Protected Member Functions | |
| virtual void | configCallback (Config &config, uint32_t level) |
| virtual void | onInit () |
| virtual void | timerCallback (const ros::TimerEvent &event) |
| Protected Member Functions inherited from pcl_ros::PCLNodelet | |
| bool | isValid (const PointCloud2::ConstPtr &cloud, const std::string &topic_name="input") |
| bool | isValid (const PointCloudConstPtr &cloud, const std::string &topic_name="input") |
| bool | isValid (const ModelCoefficientsConstPtr &model, const std::string &topic_name="model") |
| bool | isValid (const PointIndicesConstPtr &indices, const std::string &topic_name="indices") |
| virtual void | subscribe () |
| virtual void | unsubscribe () |
| Protected Member Functions inherited from nodelet_topic_tools::NodeletLazy | |
| ros::Publisher | advertise (ros::NodeHandle &nh, std::string topic, int queue_size, bool latch=false) |
| virtual void | connectionCallback (const ros::SingleSubscriberPublisher &pub) |
| virtual void | onInitPostProcess () |
| virtual void | warnNeverSubscribedCallback (const ros::WallTimerEvent &event) |
| Protected Member Functions inherited from nodelet::Nodelet | |
| ros::CallbackQueueInterface & | getMTCallbackQueue () const |
| ros::NodeHandle & | getMTNodeHandle () const |
| ros::NodeHandle & | getMTPrivateNodeHandle () const |
| const V_string & | getMyArgv () const |
| const std::string & | getName () const |
| ros::NodeHandle & | getNodeHandle () const |
| ros::NodeHandle & | getPrivateNodeHandle () const |
| const M_string & | getRemappingArgs () const |
| ros::CallbackQueueInterface & | getSTCallbackQueue () const |
| std::string | getSuffixedName (const std::string &suffix) const |
Protected Attributes | |
| bool | binary_ |
| bool | compressed_ |
| double | duration_ |
| std::string | ext_ |
| std::string | filename_ |
| std::string | fixed_frame_ |
| boost::mutex | mutex_ |
| std::string | prefix_ |
| boost::shared_ptr< dynamic_reconfigure::Server< Config > > | srv_ |
| tf::TransformListener * | tf_listener_ |
| ros::Timer | timer_ |
| Protected Attributes inherited from pcl_ros::PCLNodelet | |
| bool | approximate_sync_ |
| bool | latched_indices_ |
| int | max_queue_size_ |
| ros::Publisher | pub_output_ |
| message_filters::Subscriber< PointIndices > | sub_indices_filter_ |
| message_filters::Subscriber< PointCloud > | sub_input_filter_ |
| tf::TransformListener | tf_listener_ |
| bool | use_indices_ |
| Protected Attributes inherited from nodelet_topic_tools::NodeletLazy | |
| boost::mutex | connection_mutex_ |
| ConnectionStatus | connection_status_ |
| bool | ever_subscribed_ |
| bool | lazy_ |
| boost::shared_ptr< ros::NodeHandle > | nh_ |
| boost::shared_ptr< ros::NodeHandle > | pnh_ |
| std::vector< ros::Publisher > | publishers_ |
| ros::WallTimer | timer_ever_subscribed_ |
| bool | verbose_connection_ |
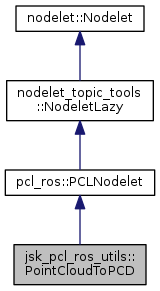
Detailed Description
Definition at line 49 of file pointcloud_to_pcd.h.
Member Typedef Documentation
| typedef PointCloudToPCDConfig jsk_pcl_ros_utils::PointCloudToPCD::Config |
Definition at line 53 of file pointcloud_to_pcd.h.
Constructor & Destructor Documentation
|
virtual |
Definition at line 47 of file pointcloud_to_pcd_nodelet.cpp.
Member Function Documentation
|
protectedvirtual |
Definition at line 128 of file pointcloud_to_pcd_nodelet.cpp.
|
protectedvirtual |
Reimplemented from pcl_ros::PCLNodelet.
Definition at line 104 of file pointcloud_to_pcd_nodelet.cpp.
|
protectedvirtual |
Definition at line 52 of file pointcloud_to_pcd_nodelet.cpp.
Member Data Documentation
|
protected |
Definition at line 65 of file pointcloud_to_pcd.h.
|
protected |
Definition at line 66 of file pointcloud_to_pcd.h.
|
protected |
Definition at line 63 of file pointcloud_to_pcd.h.
|
protected |
Definition at line 62 of file pointcloud_to_pcd.h.
|
protected |
Definition at line 61 of file pointcloud_to_pcd.h.
|
protected |
Definition at line 67 of file pointcloud_to_pcd.h.
|
protected |
Definition at line 58 of file pointcloud_to_pcd.h.
|
protected |
Definition at line 64 of file pointcloud_to_pcd.h.
|
protected |
Definition at line 59 of file pointcloud_to_pcd.h.
|
protected |
Definition at line 68 of file pointcloud_to_pcd.h.
|
protected |
Definition at line 60 of file pointcloud_to_pcd.h.
The documentation for this class was generated from the following files: