Hardware interface for a robot. More...
#include <generic_hw_interface.h>
Public Member Functions | |
| virtual bool | canSwitch (const std::list< hardware_interface::ControllerInfo > &start_list, const std::list< hardware_interface::ControllerInfo > &stop_list) const |
| Check (in non-realtime) if given controllers could be started and stopped from the current state of the RobotHW with regard to necessary hardware interface switches. Start and stop list are disjoint. This is just a check, the actual switch is done in doSwitch() | |
| virtual void | doSwitch (const std::list< hardware_interface::ControllerInfo > &start_list, const std::list< hardware_interface::ControllerInfo > &stop_list) |
| Perform (in non-realtime) all necessary hardware interface switches in order to start and stop the given controllers. Start and stop list are disjoint. The feasability was checked in canSwitch() beforehand. | |
| virtual void | enforceLimits (ros::Duration &period)=0 |
| GenericHWInterface (ros::NodeHandle &nh, urdf::Model *urdf_model=NULL) | |
| Constructor. | |
| virtual void | init () |
| Initialize the hardware interface. | |
| std::string | printCommandHelper () |
| Helper for debugging a joint's command. | |
| virtual void | printState () |
| Helper for debugging a joint's state. | |
| std::string | printStateHelper () |
| virtual void | read (ros::Duration &elapsed_time)=0 |
| Read the state from the robot hardware. | |
| virtual void | registerJointLimits (const hardware_interface::JointHandle &joint_handle_position, const hardware_interface::JointHandle &joint_handle_velocity, const hardware_interface::JointHandle &joint_handle_effort, std::size_t joint_id) |
| Register the limits of the joint specified by joint_id and joint_handle. The limits are retrieved from the urdf_model. | |
| virtual void | reset () |
| Set all members to default values. | |
| virtual void | write (ros::Duration &elapsed_time)=0 |
| Write the command to the robot hardware. | |
| virtual | ~GenericHWInterface () |
| Destructor. | |
Protected Member Functions | |
| virtual void | loadURDF (ros::NodeHandle &nh, std::string param_name) |
| Get the URDF XML from the parameter server. | |
Protected Attributes | |
| joint_limits_interface::EffortJointSaturationInterface | eff_jnt_sat_interface_ |
| joint_limits_interface::EffortJointSoftLimitsInterface | eff_jnt_soft_limits_ |
| hardware_interface::EffortJointInterface | effort_joint_interface_ |
| std::vector< double > | joint_effort_ |
| std::vector< double > | joint_effort_command_ |
| std::vector< double > | joint_effort_limits_ |
| std::vector< std::string > | joint_names_ |
| std::vector< double > | joint_position_ |
| std::vector< double > | joint_position_command_ |
| std::vector< double > | joint_position_lower_limits_ |
| std::vector< double > | joint_position_upper_limits_ |
| hardware_interface::JointStateInterface | joint_state_interface_ |
| std::vector< double > | joint_velocity_ |
| std::vector< double > | joint_velocity_command_ |
| std::vector< double > | joint_velocity_limits_ |
| std::string | name_ |
| ros::NodeHandle | nh_ |
| std::size_t | num_joints_ |
| joint_limits_interface::PositionJointSaturationInterface | pos_jnt_sat_interface_ |
| joint_limits_interface::PositionJointSoftLimitsInterface | pos_jnt_soft_limits_ |
| hardware_interface::PositionJointInterface | position_joint_interface_ |
| urdf::Model * | urdf_model_ |
| bool | use_rosparam_joint_limits_ |
| bool | use_soft_limits_if_available_ |
| joint_limits_interface::VelocityJointSaturationInterface | vel_jnt_sat_interface_ |
| joint_limits_interface::VelocityJointSoftLimitsInterface | vel_jnt_soft_limits_ |
| hardware_interface::VelocityJointInterface | velocity_joint_interface_ |
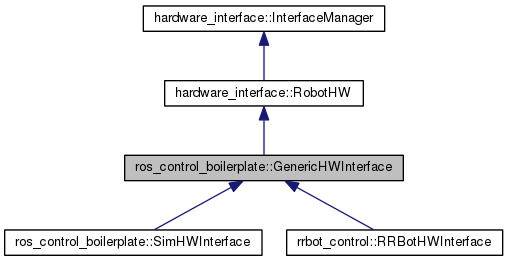
Detailed Description
Hardware interface for a robot.
Definition at line 64 of file generic_hw_interface.h.
Constructor & Destructor Documentation
| ros_control_boilerplate::GenericHWInterface::GenericHWInterface | ( | ros::NodeHandle & | nh, |
| urdf::Model * | urdf_model = NULL |
||
| ) |
Constructor.
- Parameters:
-
nh - Node handle for topics. urdf - optional pointer to a parsed robot model
Definition at line 47 of file generic_hw_interface.cpp.
| virtual ros_control_boilerplate::GenericHWInterface::~GenericHWInterface | ( | ) | [inline, virtual] |
Destructor.
Definition at line 75 of file generic_hw_interface.h.
Member Function Documentation
| virtual bool ros_control_boilerplate::GenericHWInterface::canSwitch | ( | const std::list< hardware_interface::ControllerInfo > & | start_list, |
| const std::list< hardware_interface::ControllerInfo > & | stop_list | ||
| ) | const [inline, virtual] |
Check (in non-realtime) if given controllers could be started and stopped from the current state of the RobotHW with regard to necessary hardware interface switches. Start and stop list are disjoint. This is just a check, the actual switch is done in doSwitch()
Definition at line 95 of file generic_hw_interface.h.
| virtual void ros_control_boilerplate::GenericHWInterface::doSwitch | ( | const std::list< hardware_interface::ControllerInfo > & | start_list, |
| const std::list< hardware_interface::ControllerInfo > & | stop_list | ||
| ) | [inline, virtual] |
Perform (in non-realtime) all necessary hardware interface switches in order to start and stop the given controllers. Start and stop list are disjoint. The feasability was checked in canSwitch() beforehand.
Reimplemented from hardware_interface::RobotHW.
Definition at line 106 of file generic_hw_interface.h.
| virtual void ros_control_boilerplate::GenericHWInterface::enforceLimits | ( | ros::Duration & | period | ) | [pure virtual] |
Enforce limits for all values before writing
Implemented in ros_control_boilerplate::SimHWInterface, and rrbot_control::RRBotHWInterface.
| void ros_control_boilerplate::GenericHWInterface::init | ( | ) | [virtual] |
Initialize the hardware interface.
Reimplemented in ros_control_boilerplate::SimHWInterface.
Definition at line 66 of file generic_hw_interface.cpp.
| void ros_control_boilerplate::GenericHWInterface::loadURDF | ( | ros::NodeHandle & | nh, |
| std::string | param_name | ||
| ) | [protected, virtual] |
Get the URDF XML from the parameter server.
Definition at line 304 of file generic_hw_interface.cpp.
| std::string ros_control_boilerplate::GenericHWInterface::printCommandHelper | ( | ) |
Helper for debugging a joint's command.
Definition at line 290 of file generic_hw_interface.cpp.
| void ros_control_boilerplate::GenericHWInterface::printState | ( | ) | [virtual] |
Helper for debugging a joint's state.
Definition at line 268 of file generic_hw_interface.cpp.
| std::string ros_control_boilerplate::GenericHWInterface::printStateHelper | ( | ) |
Definition at line 276 of file generic_hw_interface.cpp.
| virtual void ros_control_boilerplate::GenericHWInterface::read | ( | ros::Duration & | elapsed_time | ) | [pure virtual] |
Read the state from the robot hardware.
Implemented in ros_control_boilerplate::SimHWInterface, and rrbot_control::RRBotHWInterface.
| void ros_control_boilerplate::GenericHWInterface::registerJointLimits | ( | const hardware_interface::JointHandle & | joint_handle_position, |
| const hardware_interface::JointHandle & | joint_handle_velocity, | ||
| const hardware_interface::JointHandle & | joint_handle_effort, | ||
| std::size_t | joint_id | ||
| ) | [virtual] |
Register the limits of the joint specified by joint_id and joint_handle. The limits are retrieved from the urdf_model.
- Returns:
- the joint's type, lower position limit, upper position limit, and effort limit.
Definition at line 121 of file generic_hw_interface.cpp.
| void ros_control_boilerplate::GenericHWInterface::reset | ( | ) | [virtual] |
Set all members to default values.
Definition at line 261 of file generic_hw_interface.cpp.
| virtual void ros_control_boilerplate::GenericHWInterface::write | ( | ros::Duration & | elapsed_time | ) | [pure virtual] |
Write the command to the robot hardware.
Implemented in ros_control_boilerplate::SimHWInterface, and rrbot_control::RRBotHWInterface.
Member Data Documentation
joint_limits_interface::EffortJointSaturationInterface ros_control_boilerplate::GenericHWInterface::eff_jnt_sat_interface_ [protected] |
Definition at line 152 of file generic_hw_interface.h.
joint_limits_interface::EffortJointSoftLimitsInterface ros_control_boilerplate::GenericHWInterface::eff_jnt_soft_limits_ [protected] |
Definition at line 157 of file generic_hw_interface.h.
hardware_interface::EffortJointInterface ros_control_boilerplate::GenericHWInterface::effort_joint_interface_ [protected] |
Definition at line 147 of file generic_hw_interface.h.
std::vector<double> ros_control_boilerplate::GenericHWInterface::joint_effort_ [protected] |
Definition at line 171 of file generic_hw_interface.h.
std::vector<double> ros_control_boilerplate::GenericHWInterface::joint_effort_command_ [protected] |
Definition at line 176 of file generic_hw_interface.h.
std::vector<double> ros_control_boilerplate::GenericHWInterface::joint_effort_limits_ [protected] |
Definition at line 182 of file generic_hw_interface.h.
std::vector<std::string> ros_control_boilerplate::GenericHWInterface::joint_names_ [protected] |
Definition at line 160 of file generic_hw_interface.h.
std::vector<double> ros_control_boilerplate::GenericHWInterface::joint_position_ [protected] |
Definition at line 169 of file generic_hw_interface.h.
std::vector<double> ros_control_boilerplate::GenericHWInterface::joint_position_command_ [protected] |
Definition at line 174 of file generic_hw_interface.h.
std::vector<double> ros_control_boilerplate::GenericHWInterface::joint_position_lower_limits_ [protected] |
Definition at line 179 of file generic_hw_interface.h.
std::vector<double> ros_control_boilerplate::GenericHWInterface::joint_position_upper_limits_ [protected] |
Definition at line 180 of file generic_hw_interface.h.
hardware_interface::JointStateInterface ros_control_boilerplate::GenericHWInterface::joint_state_interface_ [protected] |
Definition at line 144 of file generic_hw_interface.h.
std::vector<double> ros_control_boilerplate::GenericHWInterface::joint_velocity_ [protected] |
Definition at line 170 of file generic_hw_interface.h.
std::vector<double> ros_control_boilerplate::GenericHWInterface::joint_velocity_command_ [protected] |
Definition at line 175 of file generic_hw_interface.h.
std::vector<double> ros_control_boilerplate::GenericHWInterface::joint_velocity_limits_ [protected] |
Definition at line 181 of file generic_hw_interface.h.
std::string ros_control_boilerplate::GenericHWInterface::name_ [protected] |
Reimplemented in ros_control_boilerplate::SimHWInterface.
Definition at line 138 of file generic_hw_interface.h.
Definition at line 141 of file generic_hw_interface.h.
std::size_t ros_control_boilerplate::GenericHWInterface::num_joints_ [protected] |
Definition at line 161 of file generic_hw_interface.h.
joint_limits_interface::PositionJointSaturationInterface ros_control_boilerplate::GenericHWInterface::pos_jnt_sat_interface_ [protected] |
Definition at line 150 of file generic_hw_interface.h.
joint_limits_interface::PositionJointSoftLimitsInterface ros_control_boilerplate::GenericHWInterface::pos_jnt_soft_limits_ [protected] |
Definition at line 155 of file generic_hw_interface.h.
hardware_interface::PositionJointInterface ros_control_boilerplate::GenericHWInterface::position_joint_interface_ [protected] |
Definition at line 145 of file generic_hw_interface.h.
Definition at line 162 of file generic_hw_interface.h.
Definition at line 165 of file generic_hw_interface.h.
Definition at line 166 of file generic_hw_interface.h.
joint_limits_interface::VelocityJointSaturationInterface ros_control_boilerplate::GenericHWInterface::vel_jnt_sat_interface_ [protected] |
Definition at line 151 of file generic_hw_interface.h.
joint_limits_interface::VelocityJointSoftLimitsInterface ros_control_boilerplate::GenericHWInterface::vel_jnt_soft_limits_ [protected] |
Definition at line 156 of file generic_hw_interface.h.
hardware_interface::VelocityJointInterface ros_control_boilerplate::GenericHWInterface::velocity_joint_interface_ [protected] |
Definition at line 146 of file generic_hw_interface.h.
The documentation for this class was generated from the following files: