Interfaces for interpreting raw packets from the Velodyne 3D LIDAR. More...
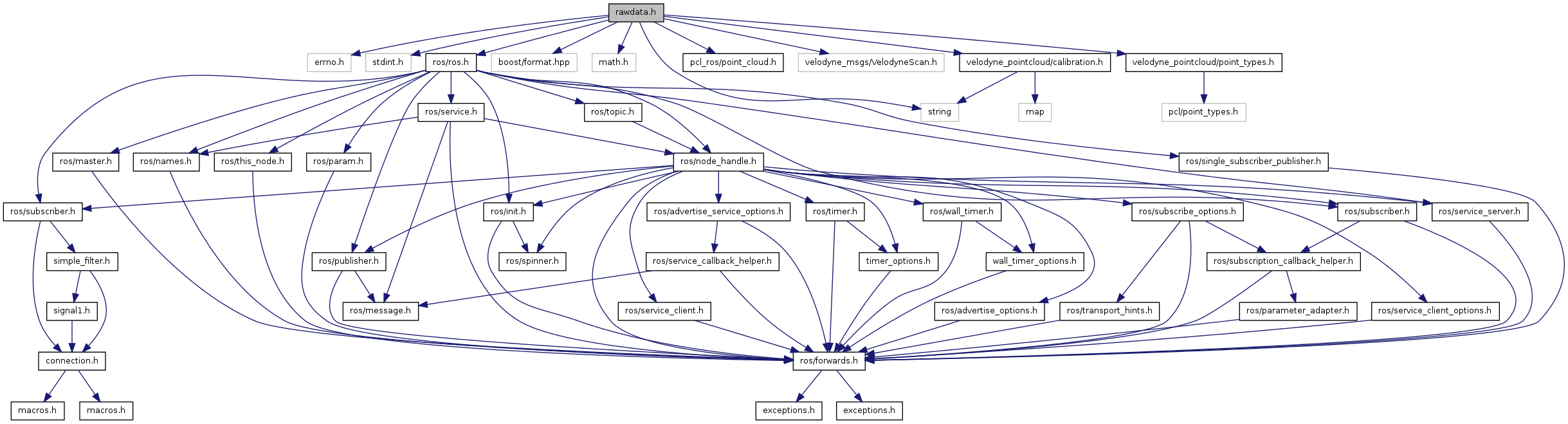
#include <errno.h>#include <stdint.h>#include <string>#include <boost/format.hpp>#include <math.h>#include <ros/ros.h>#include <pcl_ros/point_cloud.h>#include <velodyne_msgs/VelodyneScan.h>#include <velodyne_pointcloud/point_types.h>#include <velodyne_pointcloud/calibration.h>
Include dependency graph for rawdata.h:
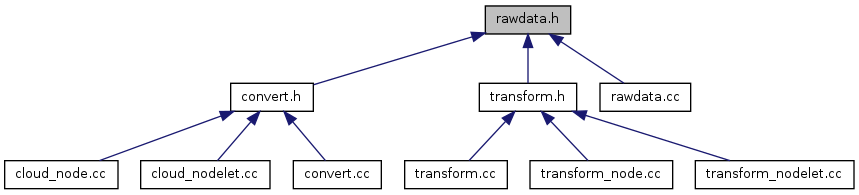
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Detailed Description
Interfaces for interpreting raw packets from the Velodyne 3D LIDAR.
Definition in file rawdata.h.