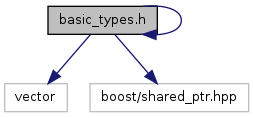
Include dependency graph for basic_types.h:
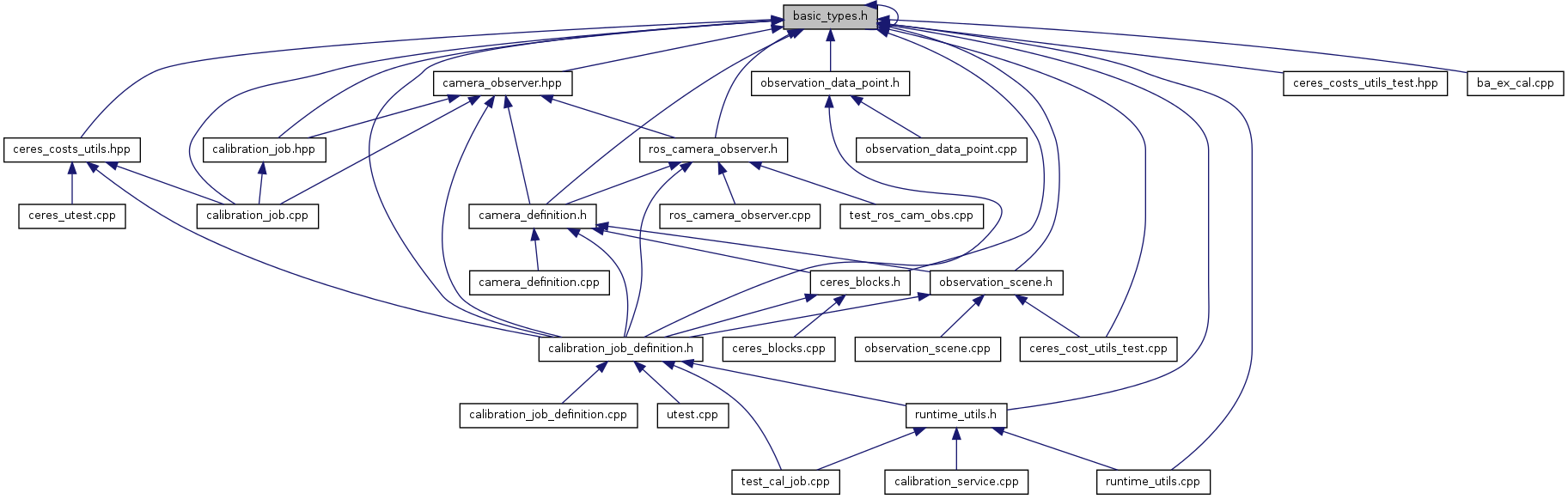
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | industrial_extrinsic_cal::ARTargetParameters |
| Parameters defining AR target. More... | |
| struct | industrial_extrinsic_cal::CameraObservations |
| A vector of observations made by a single camera of posibly multiple targets. More... | |
| struct | industrial_extrinsic_cal::CameraParameters |
| struct | industrial_extrinsic_cal::CheckerBoardParameters |
| Parameters defining checker board target. More... | |
| struct | industrial_extrinsic_cal::CircleGridParameters |
| Parameters defining circle grid target. More... | |
| struct | industrial_extrinsic_cal::MovingTarget |
| moving need a new pose with each scene in which they are used More... | |
| struct | industrial_extrinsic_cal::Observation |
| An observation is the x,y image location of a target's point in an image. More... | |
| struct | industrial_extrinsic_cal::Point3d |
| struct | industrial_extrinsic_cal::Pose6d |
| struct | industrial_extrinsic_cal::Roi |
| A region of interest in an image. More... | |
| struct | industrial_extrinsic_cal::Target |
| A target's information. More... | |
| struct | industrial_extrinsic_cal::Trigger |
| what kind of trigger initiates the collection of data for this scene More... | |
Namespaces | |
| namespace | industrial_extrinsic_cal |
Typedefs | |
| typedef struct industrial_extrinsic_cal::MovingTarget | industrial_extrinsic_cal::MovingTarget |
| moving need a new pose with each scene in which they are used | |
| typedef double * | industrial_extrinsic_cal::P_BLOCK |