#include <approach_lift_grasp.h>
Public Member Functions | |
| GraspTester () | |
| object_manipulation_msgs::GraspResult | Result (int result_code, bool continuation) |
| Helper function for convenience. | |
| void | setFeedbackFunction (boost::function< void(size_t)> f) |
| Sets the feedback function. | |
| void | setInterruptFunction (boost::function< bool()> f) |
| Sets the interrupt function. | |
| void | setMarkerPublisher (GraspMarkerPublisher *pub) |
| Sets the marker publisher to be used. | |
| virtual void | testGrasps (const object_manipulation_msgs::PickupGoal &pickup_goal, const std::vector< object_manipulation_msgs::Grasp > &grasps, std::vector< GraspExecutionInfo > &execution_info, bool return_on_first_hit) |
| Tests a set of grasps and provides their execution info. | |
Protected Member Functions | |
| virtual void | testGrasp (const object_manipulation_msgs::PickupGoal &pickup_goal, const object_manipulation_msgs::Grasp &grasp, GraspExecutionInfo &execution_info)=0 |
| Tests a single grasp. | |
Protected Attributes | |
| boost::function< void(size_t)> | feedback_function_ |
| boost::function< bool()> | interrupt_function_ |
| Function used to check for interrupts. | |
| GraspMarkerPublisher * | marker_publisher_ |
| The marker publisher that will be used; NULL is marker publishing is disabled. | |
Detailed Description
Tests grasps for feasibility in the current environment, and generates info needed for execution
Definition at line 61 of file approach_lift_grasp.h.
Constructor & Destructor Documentation
| object_manipulator::GraspTester::GraspTester | ( | ) | [inline] |
Definition at line 78 of file approach_lift_grasp.h.
Member Function Documentation
| object_manipulation_msgs::GraspResult object_manipulator::GraspTester::Result | ( | int | result_code, |
| bool | continuation | ||
| ) | [inline] |
Helper function for convenience.
Definition at line 96 of file approach_lift_grasp.h.
| void object_manipulator::GraspTester::setFeedbackFunction | ( | boost::function< void(size_t)> | f | ) | [inline] |
Sets the feedback function.
Definition at line 90 of file approach_lift_grasp.h.
| void object_manipulator::GraspTester::setInterruptFunction | ( | boost::function< bool()> | f | ) | [inline] |
Sets the interrupt function.
Definition at line 93 of file approach_lift_grasp.h.
| void object_manipulator::GraspTester::setMarkerPublisher | ( | GraspMarkerPublisher * | pub | ) | [inline] |
Sets the marker publisher to be used.
Definition at line 87 of file approach_lift_grasp.h.
| virtual void object_manipulator::GraspTester::testGrasp | ( | const object_manipulation_msgs::PickupGoal & | pickup_goal, |
| const object_manipulation_msgs::Grasp & | grasp, | ||
| GraspExecutionInfo & | execution_info | ||
| ) | [protected, pure virtual] |
Tests a single grasp.
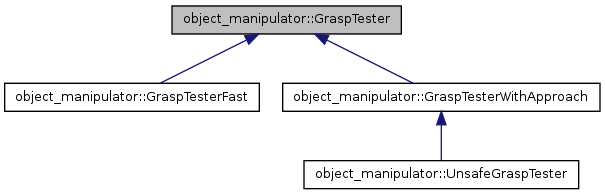
Implemented in object_manipulator::GraspTesterWithApproach, and object_manipulator::GraspTesterFast.
| void object_manipulator::GraspTester::testGrasps | ( | const object_manipulation_msgs::PickupGoal & | pickup_goal, |
| const std::vector< object_manipulation_msgs::Grasp > & | grasps, | ||
| std::vector< GraspExecutionInfo > & | execution_info, | ||
| bool | return_on_first_hit | ||
| ) | [virtual] |
Tests a set of grasps and provides their execution info.
Reimplemented in object_manipulator::GraspTesterFast.
Definition at line 51 of file approach_lift_grasp.cpp.
Member Data Documentation
boost::function<void(size_t)> object_manipulator::GraspTester::feedback_function_ [protected] |
Function used to provide feedback on which grasp is being tested Might find a more elegant mechanism in the future
Definition at line 73 of file approach_lift_grasp.h.
boost::function<bool()> object_manipulator::GraspTester::interrupt_function_ [protected] |
Function used to check for interrupts.
Definition at line 76 of file approach_lift_grasp.h.
The marker publisher that will be used; NULL is marker publishing is disabled.
Definition at line 69 of file approach_lift_grasp.h.
The documentation for this class was generated from the following files: