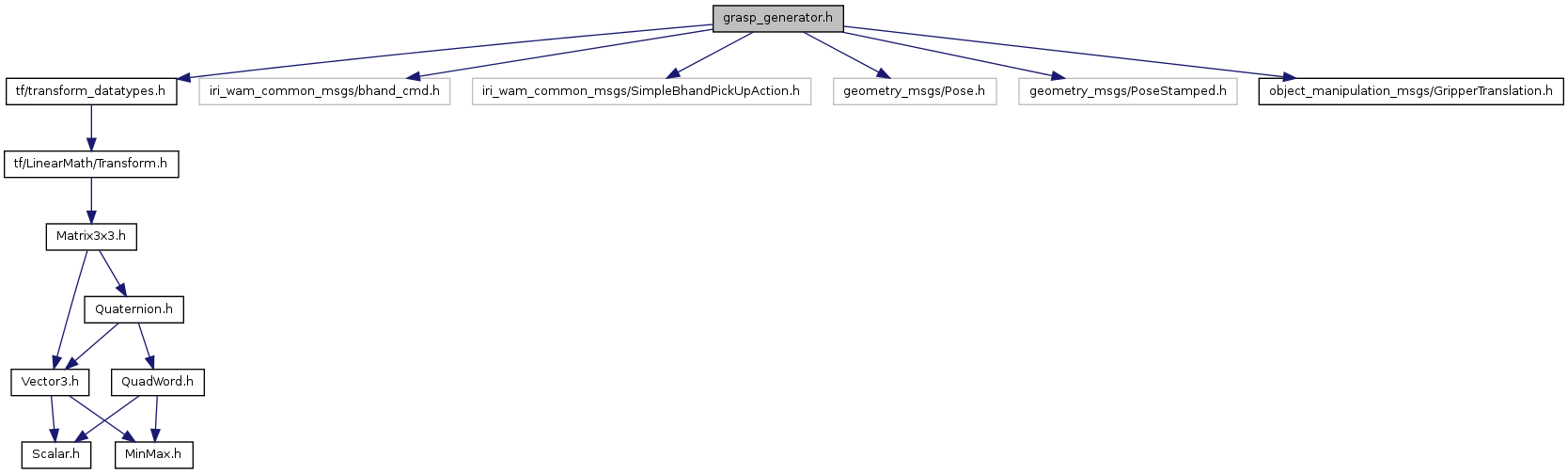
#include <tf/transform_datatypes.h>#include <iri_wam_common_msgs/bhand_cmd.h>#include <iri_wam_common_msgs/SimpleBhandPickUpAction.h>#include <geometry_msgs/Pose.h>#include <geometry_msgs/PoseStamped.h>#include <object_manipulation_msgs/GripperTranslation.h>
Include dependency graph for grasp_generator.h:
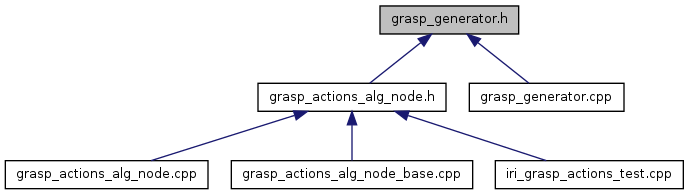
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | GraspGenerator |
| class | GraspPhase |
| class | GraspPhaseMoveArm |
| class | GraspPhaseSetFingers |
Typedefs | |
| typedef std::vector< std::string > | GraspFingersConfiguration |
| typedef boost::shared_ptr < GraspPhase > | GraspPhasePtr |
| typedef std::vector < GraspPhasePtr > | GraspPhaseSequence |
Enumerations | |
| enum | GraspPhaseType { SET_FINGER_POSITION, MOVE_ARM } |
Typedef Documentation
| typedef std::vector<std::string> GraspFingersConfiguration |
Definition at line 27 of file grasp_generator.h.
| typedef boost::shared_ptr<GraspPhase> GraspPhasePtr |
Definition at line 55 of file grasp_generator.h.
| typedef std::vector<GraspPhasePtr> GraspPhaseSequence |
Definition at line 57 of file grasp_generator.h.
Enumeration Type Documentation
| enum GraspPhaseType |
Definition at line 11 of file grasp_generator.h.