#include <boost/test/unit_test.hpp>#include "fcl/traversal/traversal_node_bvhs.h"#include "fcl/traversal/traversal_node_setup.h"#include "fcl/collision_node.h"#include "fcl/collision.h"#include "fcl/BV/BV.h"#include "fcl/shape/geometric_shapes.h"#include "fcl/narrowphase/narrowphase.h"#include "test_fcl_utility.h"#include "fcl_resources/config.h"#include <boost/filesystem.hpp>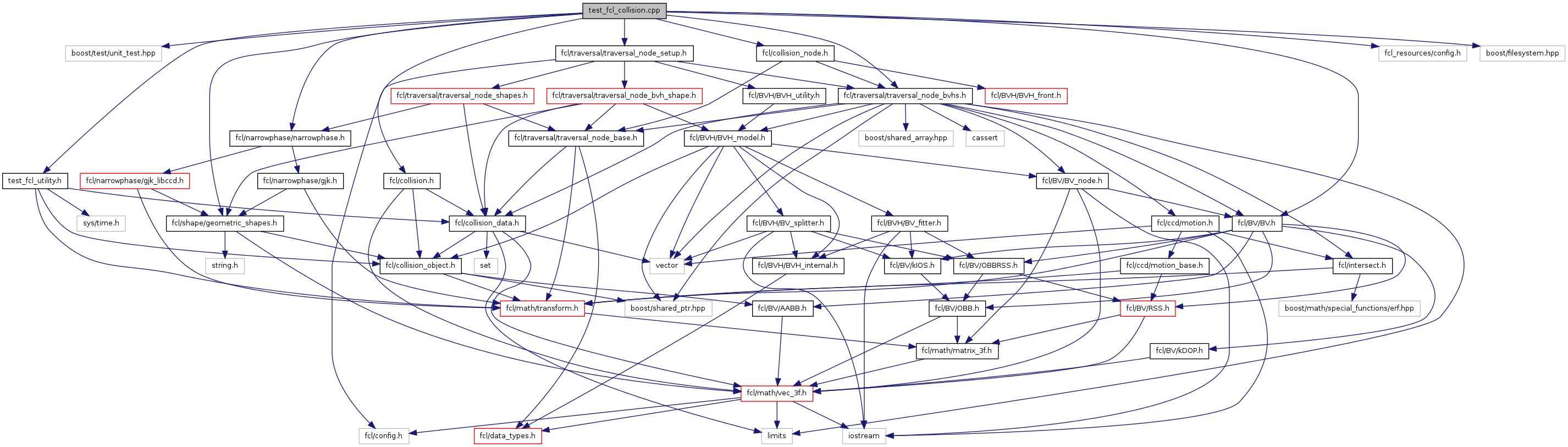
Go to the source code of this file.
Defines | |
| #define | BOOST_TEST_MODULE "FCL_COLLISION" |
Functions | |
| BOOST_AUTO_TEST_CASE (OBB_Box_test) | |
| BOOST_AUTO_TEST_CASE (OBB_shape_test) | |
| BOOST_AUTO_TEST_CASE (OBB_AABB_test) | |
| BOOST_AUTO_TEST_CASE (mesh_mesh) | |
| template<typename BV > | |
| bool | collide_Test (const Transform3f &tf, const std::vector< Vec3f > &vertices1, const std::vector< Triangle > &triangles1, const std::vector< Vec3f > &vertices2, const std::vector< Triangle > &triangles2, SplitMethodType split_method, bool verbose=true) |
| template<typename BV > | |
| bool | collide_Test2 (const Transform3f &tf, const std::vector< Vec3f > &vertices1, const std::vector< Triangle > &triangles1, const std::vector< Vec3f > &vertices2, const std::vector< Triangle > &triangles2, SplitMethodType split_method, bool verbose=true) |
| template<typename BV , typename TraversalNode > | |
| bool | collide_Test_Oriented (const Transform3f &tf, const std::vector< Vec3f > &vertices1, const std::vector< Triangle > &triangles1, const std::vector< Vec3f > &vertices2, const std::vector< Triangle > &triangles2, SplitMethodType split_method, bool verbose=true) |
| template<typename BV > | |
| bool | test_collide_func (const Transform3f &tf, const std::vector< Vec3f > &vertices1, const std::vector< Triangle > &triangles1, const std::vector< Vec3f > &vertices2, const std::vector< Triangle > &triangles2, SplitMethodType split_method) |
Variables | |
| bool | enable_contact = true |
| std::vector< Contact > | global_pairs |
| std::vector< Contact > | global_pairs_now |
| int | num_max_contacts = std::numeric_limits<int>::max() |
| #define BOOST_TEST_MODULE "FCL_COLLISION" |
Definition at line 37 of file test_fcl_collision.cpp.
| BOOST_AUTO_TEST_CASE | ( | OBB_Box_test | ) |
Definition at line 80 of file test_fcl_collision.cpp.
| BOOST_AUTO_TEST_CASE | ( | OBB_shape_test | ) |
Definition at line 124 of file test_fcl_collision.cpp.
| BOOST_AUTO_TEST_CASE | ( | OBB_AABB_test | ) |
Definition at line 190 of file test_fcl_collision.cpp.
| BOOST_AUTO_TEST_CASE | ( | mesh_mesh | ) |
Definition at line 231 of file test_fcl_collision.cpp.
| bool collide_Test | ( | const Transform3f & | tf, |
| const std::vector< Vec3f > & | vertices1, | ||
| const std::vector< Triangle > & | triangles1, | ||
| const std::vector< Vec3f > & | vertices2, | ||
| const std::vector< Triangle > & | triangles2, | ||
| SplitMethodType | split_method, | ||
| bool | verbose = true |
||
| ) |
Definition at line 872 of file test_fcl_collision.cpp.
| bool collide_Test2 | ( | const Transform3f & | tf, |
| const std::vector< Vec3f > & | vertices1, | ||
| const std::vector< Triangle > & | triangles1, | ||
| const std::vector< Vec3f > & | vertices2, | ||
| const std::vector< Triangle > & | triangles2, | ||
| SplitMethodType | split_method, | ||
| bool | verbose = true |
||
| ) |
Definition at line 806 of file test_fcl_collision.cpp.
| bool collide_Test_Oriented | ( | const Transform3f & | tf, |
| const std::vector< Vec3f > & | vertices1, | ||
| const std::vector< Triangle > & | triangles1, | ||
| const std::vector< Vec3f > & | vertices2, | ||
| const std::vector< Triangle > & | triangles2, | ||
| SplitMethodType | split_method, | ||
| bool | verbose = true |
||
| ) |
Definition at line 930 of file test_fcl_collision.cpp.
| bool test_collide_func | ( | const Transform3f & | tf, |
| const std::vector< Vec3f > & | vertices1, | ||
| const std::vector< Triangle > & | triangles1, | ||
| const std::vector< Vec3f > & | vertices2, | ||
| const std::vector< Triangle > & | triangles2, | ||
| SplitMethodType | split_method | ||
| ) |
Definition at line 987 of file test_fcl_collision.cpp.
| bool enable_contact = true |
Definition at line 75 of file test_fcl_collision.cpp.
| std::vector<Contact> global_pairs |
Definition at line 77 of file test_fcl_collision.cpp.
| std::vector<Contact> global_pairs_now |
Definition at line 78 of file test_fcl_collision.cpp.
| int num_max_contacts = std::numeric_limits<int>::max() |
Definition at line 74 of file test_fcl_collision.cpp.

