Uses Cartesian movements to get to pre-grasp and grasp. More...
#include <unsafe_grasp_executor.h>
Public Member Functions | |
| UnsafeGraspExecutor (GraspMarkerPublisher *pub) | |
| Only calls super constructor. | |
Protected Member Functions | |
| virtual arm_navigation_msgs::OrderedCollisionOperations | collisionOperationsForGrasp (const object_manipulation_msgs::PickupGoal &pickup_goal) |
| Disables collisions when planning the grasp motion. | |
| arm_navigation_msgs::OrderedCollisionOperations | collisionOperationsForLift (const object_manipulation_msgs::PickupGoal &pickup_goal) |
| Collision operations to be used when planning the lift motion. | |
| virtual object_manipulation_msgs::GraspResult | executeGrasp (const object_manipulation_msgs::PickupGoal &pickup_goal, const object_manipulation_msgs::Grasp &grasp) |
| Uses Cartesian movement to get to pre-grasp, then either reactive. | |
Uses Cartesian movements to get to pre-grasp and grasp.
Initial check consists of non-collision-aware IK for the grasp and pre-grasp.
Execution consists of using Cartesian controllers to move directly to the pre-grasp, ignoring any possible collisions, then opening the hand to the desired pre-grasp configuration, then moving from pre-grasp to grasp again with Cartesian controllers (reactively if desired).
This is intended for crowded situations where the hand is already close to the pre-grasp and we want to just move directly there, shove things out of the way, and grasp.
Definition at line 56 of file unsafe_grasp_executor.h.
| object_manipulator::UnsafeGraspExecutor::UnsafeGraspExecutor | ( | GraspMarkerPublisher * | pub | ) | [inline] |
Only calls super constructor.
Definition at line 76 of file unsafe_grasp_executor.h.
| arm_navigation_msgs::OrderedCollisionOperations object_manipulator::UnsafeGraspExecutor::collisionOperationsForGrasp | ( | const object_manipulation_msgs::PickupGoal & | pickup_goal | ) | [protected, virtual] |
Disables collisions when planning the grasp motion.
Disable collisions between everything and everything
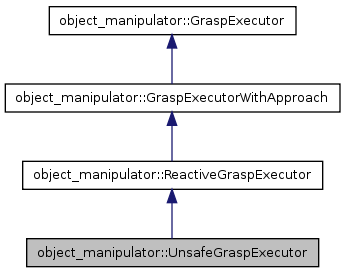
Reimplemented from object_manipulator::GraspExecutorWithApproach.
Definition at line 131 of file unsafe_grasp_executor.cpp.
| arm_navigation_msgs::OrderedCollisionOperations object_manipulator::UnsafeGraspExecutor::collisionOperationsForLift | ( | const object_manipulation_msgs::PickupGoal & | pickup_goal | ) | [protected] |
Collision operations to be used when planning the lift motion.
Disables collision between everything and everything
Reimplemented from object_manipulator::GraspExecutor.
Definition at line 146 of file unsafe_grasp_executor.cpp.
| GraspResult object_manipulator::UnsafeGraspExecutor::executeGrasp | ( | const object_manipulation_msgs::PickupGoal & | pickup_goal, | |
| const object_manipulation_msgs::Grasp & | grasp | |||
| ) | [protected, virtual] |
Uses Cartesian movement to get to pre-grasp, then either reactive.
Reimplemented from object_manipulator::ReactiveGraspExecutor.
Definition at line 44 of file unsafe_grasp_executor.cpp.

