#include <gtest/gtest.h>#include "steering_functions/steering_functions.hpp"#include "steering_functions/hc_cc_state_space/configuration.hpp"#include "steering_functions/hc_cc_state_space/hc_cc_circle.hpp"#include "steering_functions/hc_cc_state_space/hc_cc_state_space.hpp"#include "steering_functions/hc_cc_state_space/paths.hpp"#include "steering_functions/utilities/utilities.hpp"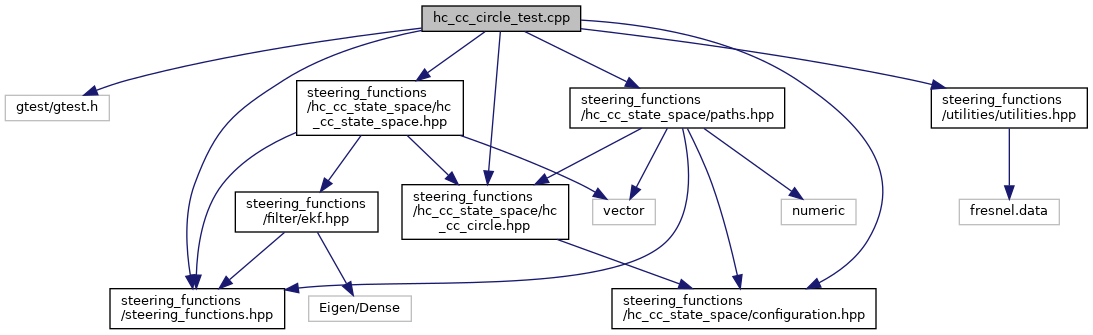
Go to the source code of this file.
Classes | |
| class | Test_HC_CC_State_Space |
Macros | |
| #define | DISCRETIZATION 0.05 |
| #define | EPS_DISTANCE 0.01 |
| #define | EPS_KAPPA 1e-6 |
| #define | EPS_SIGMA 1e-6 |
| #define | KAPPA 1.0 |
Functions | |
| Configuration | get_cc_goal_config (double delta, const HC_CC_Circle_Param &hc_cc_circle_param) |
| double | get_distance (const State &state1, const State &state2) |
| Configuration | get_hc_goal_config (double delta, const HC_CC_Circle_Param &hc_cc_circle_param) |
| vector< double > | get_linear_samples (double start, double stop, size_t num) |
| double | get_path_length (const vector< State > &path) |
| int | main (int argc, char **argv) |
| TEST (HC_CC_Circle, maxCurvature) | |
| TEST (HC_CC_Circle, maxSharpness) | |
| TEST (HC_CC_Circle, pathLength) | |
| TEST (HC_CC_Circle, reachingGoal) | |
Variables | |
| vector< double > | deltas = get_linear_samples(0.0, 2 * M_PI, 1e3) |
| vector< double > | sigmas = get_linear_samples(0.02, 200.0, 1000) |
| Configuration | start_config (0.0, 0.0, 0.0, 0.0) |
Macro Definition Documentation
◆ DISCRETIZATION
| #define DISCRETIZATION 0.05 |
Definition at line 31 of file hc_cc_circle_test.cpp.
◆ EPS_DISTANCE
| #define EPS_DISTANCE 0.01 |
Definition at line 27 of file hc_cc_circle_test.cpp.
◆ EPS_KAPPA
| #define EPS_KAPPA 1e-6 |
Definition at line 28 of file hc_cc_circle_test.cpp.
◆ EPS_SIGMA
| #define EPS_SIGMA 1e-6 |
Definition at line 29 of file hc_cc_circle_test.cpp.
◆ KAPPA
| #define KAPPA 1.0 |
Definition at line 30 of file hc_cc_circle_test.cpp.
Function Documentation
◆ get_cc_goal_config()
| Configuration get_cc_goal_config | ( | double | delta, |
| const HC_CC_Circle_Param & | hc_cc_circle_param | ||
| ) |
Definition at line 55 of file hc_cc_circle_test.cpp.
◆ get_distance()
Definition at line 98 of file hc_cc_circle_test.cpp.
◆ get_hc_goal_config()
| Configuration get_hc_goal_config | ( | double | delta, |
| const HC_CC_Circle_Param & | hc_cc_circle_param | ||
| ) |
Definition at line 71 of file hc_cc_circle_test.cpp.
◆ get_linear_samples()
| vector<double> get_linear_samples | ( | double | start, |
| double | stop, | ||
| size_t | num | ||
| ) |
Definition at line 88 of file hc_cc_circle_test.cpp.
◆ get_path_length()
| double get_path_length | ( | const vector< State > & | path | ) |
Definition at line 103 of file hc_cc_circle_test.cpp.
◆ main()
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 309 of file hc_cc_circle_test.cpp.
◆ TEST() [1/4]
| TEST | ( | HC_CC_Circle | , |
| maxCurvature | |||
| ) |
Definition at line 274 of file hc_cc_circle_test.cpp.
◆ TEST() [2/4]
| TEST | ( | HC_CC_Circle | , |
| maxSharpness | |||
| ) |
Definition at line 247 of file hc_cc_circle_test.cpp.
◆ TEST() [3/4]
| TEST | ( | HC_CC_Circle | , |
| pathLength | |||
| ) |
Definition at line 119 of file hc_cc_circle_test.cpp.
◆ TEST() [4/4]
| TEST | ( | HC_CC_Circle | , |
| reachingGoal | |||
| ) |
Definition at line 183 of file hc_cc_circle_test.cpp.
Variable Documentation
◆ deltas
| vector<double> deltas = get_linear_samples(0.0, 2 * M_PI, 1e3) |
Definition at line 117 of file hc_cc_circle_test.cpp.
◆ sigmas
| vector<double> sigmas = get_linear_samples(0.02, 200.0, 1000) |
Definition at line 116 of file hc_cc_circle_test.cpp.
◆ start_config
| Configuration start_config(0.0, 0.0, 0.0, 0.0) |