This file implements SbgECom commands related to sensor. More...
#include "sbgEComCmdCommon.h"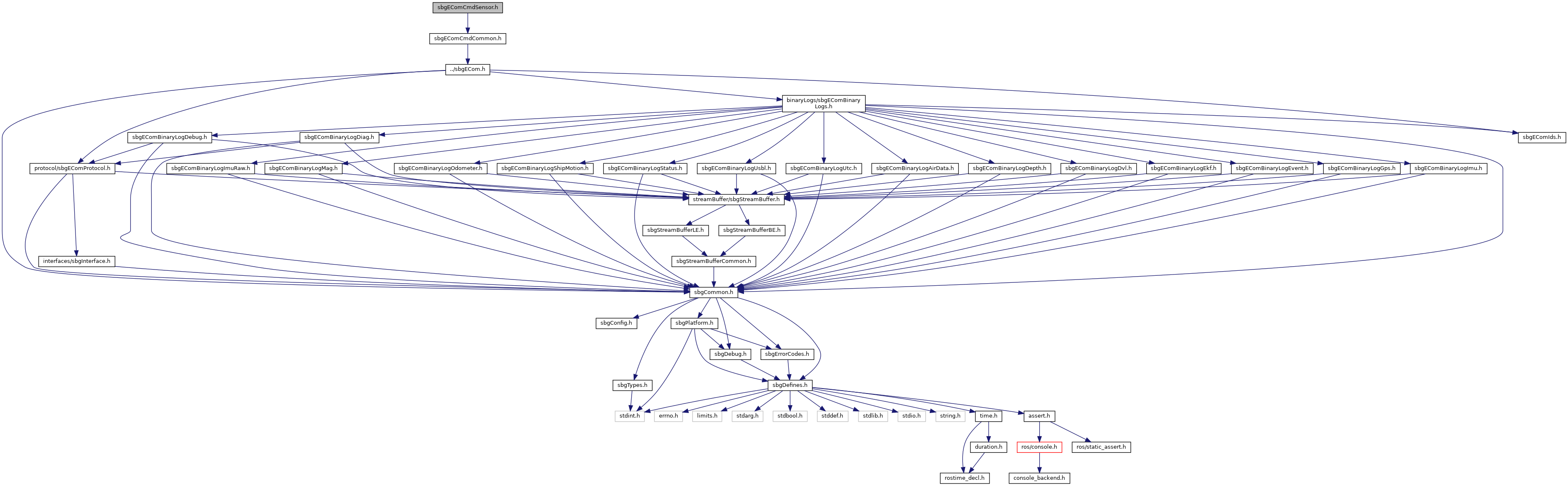
Go to the source code of this file.
Classes | |
| struct | _SbgEComAidingAssignConf |
| struct | _SbgEComInitConditionConf |
| struct | _SbgEComSensorAlignmentInfo |
Typedefs | |
| typedef struct _SbgEComAidingAssignConf | SbgEComAidingAssignConf |
| typedef struct _SbgEComInitConditionConf | SbgEComInitConditionConf |
| typedef enum _SbgEComModulePortAssignment | SbgEComModulePortAssignment |
| typedef enum _SbgEComModuleSyncAssignment | SbgEComModuleSyncAssignment |
| typedef enum _SbgEComMotionProfileStdIds | SbgEComMotionProfileStdIds |
| typedef enum _SbgEComOdometerPinAssignment | SbgEComOdometerPinAssignment |
| typedef struct _SbgEComSensorAlignmentInfo | SbgEComSensorAlignmentInfo |
Functions | |
| SbgErrorCode | sbgEComCmdSensorGetAidingAssignment (SbgEComHandle *pHandle, SbgEComAidingAssignConf *pConf) |
| SbgErrorCode | sbgEComCmdSensorGetAlignmentAndLeverArm (SbgEComHandle *pHandle, SbgEComSensorAlignmentInfo *pAlignConf, float leverArm[3]) |
| SbgErrorCode | sbgEComCmdSensorGetInitCondition (SbgEComHandle *pHandle, SbgEComInitConditionConf *pConf) |
| SbgErrorCode | sbgEComCmdSensorGetMotionProfileInfo (SbgEComHandle *pHandle, SbgEComModelInfo *pMotionProfileInfo) |
| SbgErrorCode | sbgEComCmdSensorSetAidingAssignment (SbgEComHandle *pHandle, const SbgEComAidingAssignConf *pConf) |
| SbgErrorCode | sbgEComCmdSensorSetAlignmentAndLeverArm (SbgEComHandle *pHandle, const SbgEComSensorAlignmentInfo *pAlignConf, const float leverArm[3]) |
| SbgErrorCode | sbgEComCmdSensorSetInitCondition (SbgEComHandle *pHandle, const SbgEComInitConditionConf *pConf) |
| SbgErrorCode | sbgEComCmdSensorSetMotionProfileId (SbgEComHandle *pHandle, uint32_t id) |
Detailed Description
This file implements SbgECom commands related to sensor.
- Date
- 11 June 2014
Copyright Notice
Copyright (C) 2007-2013, SBG Systems SAS. All rights reserved.
This source code is intended for use only by SBG Systems SAS and those that have explicit written permission to use it from SBG Systems SAS.
THIS CODE AND INFORMATION IS PROVIDED "AS IS" WITHOUT WARRANTY OF ANY KIND, EITHER EXPRESSED OR IMPLIED, INCLUDING BUT NOT LIMITED TO THE IMPLIED WARRANTIES OF MERCHANTABILITY AND/OR FITNESS FOR A PARTICULAR PURPOSE.
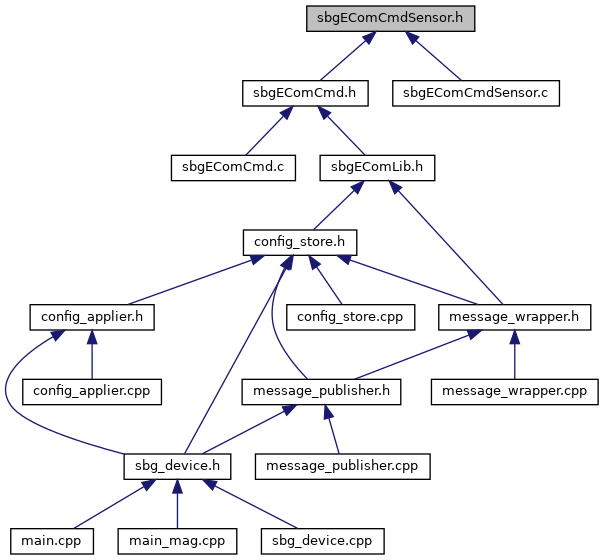
Definition in file sbgEComCmdSensor.h.
Typedef Documentation
◆ SbgEComAidingAssignConf
| typedef struct _SbgEComAidingAssignConf SbgEComAidingAssignConf |
Helper structure for module assignments
◆ SbgEComInitConditionConf
| typedef struct _SbgEComInitConditionConf SbgEComInitConditionConf |
Helper structure for sensor Initial condition details
◆ SbgEComModulePortAssignment
| typedef enum _SbgEComModulePortAssignment SbgEComModulePortAssignment |
Ports available for the modules.
◆ SbgEComModuleSyncAssignment
| typedef enum _SbgEComModuleSyncAssignment SbgEComModuleSyncAssignment |
Synchronization signals available for the modules.
◆ SbgEComMotionProfileStdIds
| typedef enum _SbgEComMotionProfileStdIds SbgEComMotionProfileStdIds |
This enum defines the different motion profile IDs available in standard
◆ SbgEComOdometerPinAssignment
List of configurations available for the odometer.
◆ SbgEComSensorAlignmentInfo
| typedef struct _SbgEComSensorAlignmentInfo SbgEComSensorAlignmentInfo |
Helper structure for sensor alignment details
Enumeration Type Documentation
◆ _SbgEComModulePortAssignment
Ports available for the modules.
Definition at line 32 of file sbgEComCmdSensor.h.
◆ _SbgEComModuleSyncAssignment
Synchronization signals available for the modules.
Definition at line 45 of file sbgEComCmdSensor.h.
◆ _SbgEComMotionProfileStdIds
This enum defines the different motion profile IDs available in standard
Definition at line 71 of file sbgEComCmdSensor.h.
◆ _SbgEComOdometerPinAssignment
List of configurations available for the odometer.
Definition at line 60 of file sbgEComCmdSensor.h.
Function Documentation
◆ sbgEComCmdSensorGetAidingAssignment()
| SbgErrorCode sbgEComCmdSensorGetAidingAssignment | ( | SbgEComHandle * | pHandle, |
| SbgEComAidingAssignConf * | pConf | ||
| ) |
Retrieve the assignment of the aiding sensors.
- Parameters
-
[in] pHandle A valid sbgECom handle. [out] pConf Pointer to a SbgEComAidingAssignConf to contain the current assignment of the aiding sensors.
- Returns
- SBG_NO_ERROR if the command has been executed successfully.
< Reserved fields to ignore
Definition at line 193 of file sbgEComCmdSensor.c.
◆ sbgEComCmdSensorGetAlignmentAndLeverArm()
| SbgErrorCode sbgEComCmdSensorGetAlignmentAndLeverArm | ( | SbgEComHandle * | pHandle, |
| SbgEComSensorAlignmentInfo * | pAlignConf, | ||
| float | leverArm[3] | ||
| ) |
Retrieve the alignment and lever arm configuration of the sensor.
- Parameters
-
[in] pHandle A valid sbgECom handle. [out] pAlignConf Pointer to a SbgEComSensorAlignmentInfo struct to hold alignment configuration of the sensor. [out] leverArm Pointer to a table to contain lever arm X, Y, Z components in meters.
- Returns
- SBG_NO_ERROR if the command has been executed successfully.
Definition at line 358 of file sbgEComCmdSensor.c.
◆ sbgEComCmdSensorGetInitCondition()
| SbgErrorCode sbgEComCmdSensorGetInitCondition | ( | SbgEComHandle * | pHandle, |
| SbgEComInitConditionConf * | pConf | ||
| ) |
Retrieve the initial conditions settings.
- Parameters
-
[in] pHandle A valid sbgECom handle. [out] pConf Pointer to a SbgEComInitConditionConf to contain the current initial conditions settings.
- Returns
- SBG_NO_ERROR if the command has been executed successfully.
Definition at line 44 of file sbgEComCmdSensor.c.
◆ sbgEComCmdSensorGetMotionProfileInfo()
| SbgErrorCode sbgEComCmdSensorGetMotionProfileInfo | ( | SbgEComHandle * | pHandle, |
| SbgEComModelInfo * | pModelInfo | ||
| ) |
Retrieve Motion profile information.
- Parameters
-
[in] pHandle A valid sbgECom handle. [out] pMotionProfileInfo Pointer to a SbgEComModelInfo to contain the current motion profile info.
- Returns
- SBG_NO_ERROR if the command has been executed successfully.
Definition at line 30 of file sbgEComCmdSensor.c.
◆ sbgEComCmdSensorSetAidingAssignment()
| SbgErrorCode sbgEComCmdSensorSetAidingAssignment | ( | SbgEComHandle * | pHandle, |
| const SbgEComAidingAssignConf * | pConf | ||
| ) |
Set the assignment of the aiding sensors.
- Parameters
-
[in] pHandle A valid sbgECom handle. [out] pConf Pointer to a SbgEComAidingAssignConf containing the new assignment of the aiding sensors.
- Returns
- SBG_NO_ERROR if the command has been executed successfully.
Definition at line 273 of file sbgEComCmdSensor.c.
◆ sbgEComCmdSensorSetAlignmentAndLeverArm()
| SbgErrorCode sbgEComCmdSensorSetAlignmentAndLeverArm | ( | SbgEComHandle * | pHandle, |
| const SbgEComSensorAlignmentInfo * | pAlignConf, | ||
| const float | leverArm[3] | ||
| ) |
Set the alignment and lever arm configuration of the sensor.
- Parameters
-
[in] pHandle A valid sbgECom handle. [in] pAlignConf Pointer to a SbgEComSensorAlignmentInfo struct holding alignment configuration for the sensor. [in] leverArm Pointer to a table containing lever arm X, Y, Z components in meters.
- Returns
- SBG_NO_ERROR if the command has been executed successfully.
Definition at line 437 of file sbgEComCmdSensor.c.
◆ sbgEComCmdSensorSetInitCondition()
| SbgErrorCode sbgEComCmdSensorSetInitCondition | ( | SbgEComHandle * | pHandle, |
| const SbgEComInitConditionConf * | pConf | ||
| ) |
Set the initial condition configuration.
- Parameters
-
[in] pHandle A valid sbgECom handle. [in] pConf Pointer to a SbgEComInitConditionConf containing the new initial condition configuration.
- Returns
- SBG_NO_ERROR if the command has been executed successfully.
Definition at line 119 of file sbgEComCmdSensor.c.
◆ sbgEComCmdSensorSetMotionProfileId()
| SbgErrorCode sbgEComCmdSensorSetMotionProfileId | ( | SbgEComHandle * | pHandle, |
| uint32_t | id | ||
| ) |
Set a Motion profile ID.
- Parameters
-
[in] pHandle A valid sbgECom handle.
Definition at line 15 of file sbgEComCmdSensor.c.