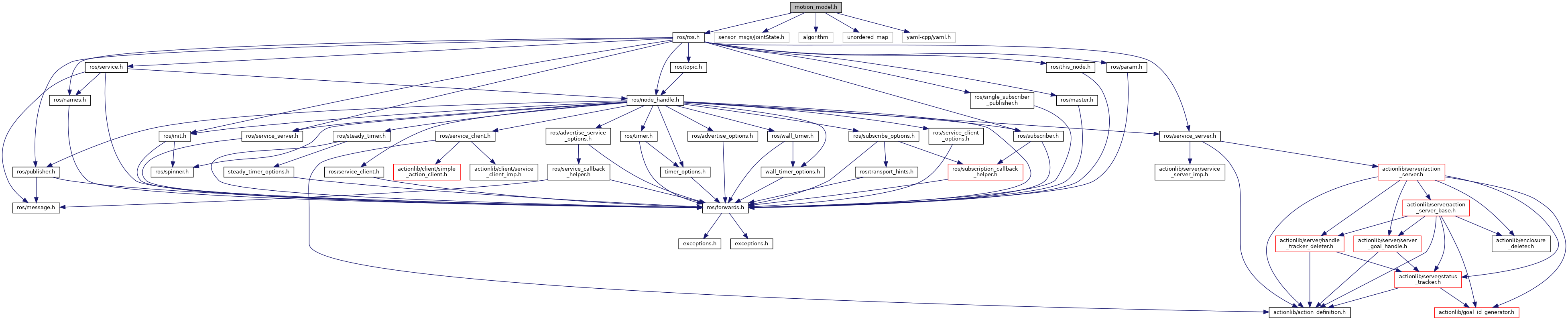
#include <ros/ros.h>#include <sensor_msgs/JointState.h>#include <algorithm>#include <unordered_map>#include <yaml-cpp/yaml.h>
Include dependency graph for motion_model.h:
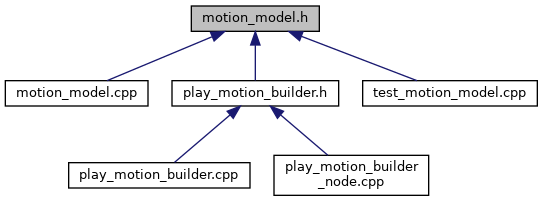
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | pal::JointGroup |
| struct | pal::JointModel |
| struct | pal::JointPosition |
| class | pal::KeyFrame |
| class | pal::Motion |
| struct | pal::PrintMeta |
| struct | pal::PrintMotion |
| struct | pal::PrintPoint |
Namespaces | |
| pal | |
| YAML | |
Functions | |
| std::string | pal::cleanName (const std::string &name) |
| void | pal::loadParams (const YAML::Emitter ¶m, const std::string &filename) |
| Emitter & | YAML::operator<< (YAML::Emitter &out, const pal::PrintMotion &m) |
| Emitter & | YAML::operator<< (YAML::Emitter &out, const pal::PrintPoint &k) |
| Emitter & | YAML::operator<< (YAML::Emitter &out, const pal::PrintMeta &m) |
| std::string | pal::rosifyName (const std::string &name) |
| double | pal::toDouble (XmlRpc::XmlRpcValue &value) |