for planar smoothing More...
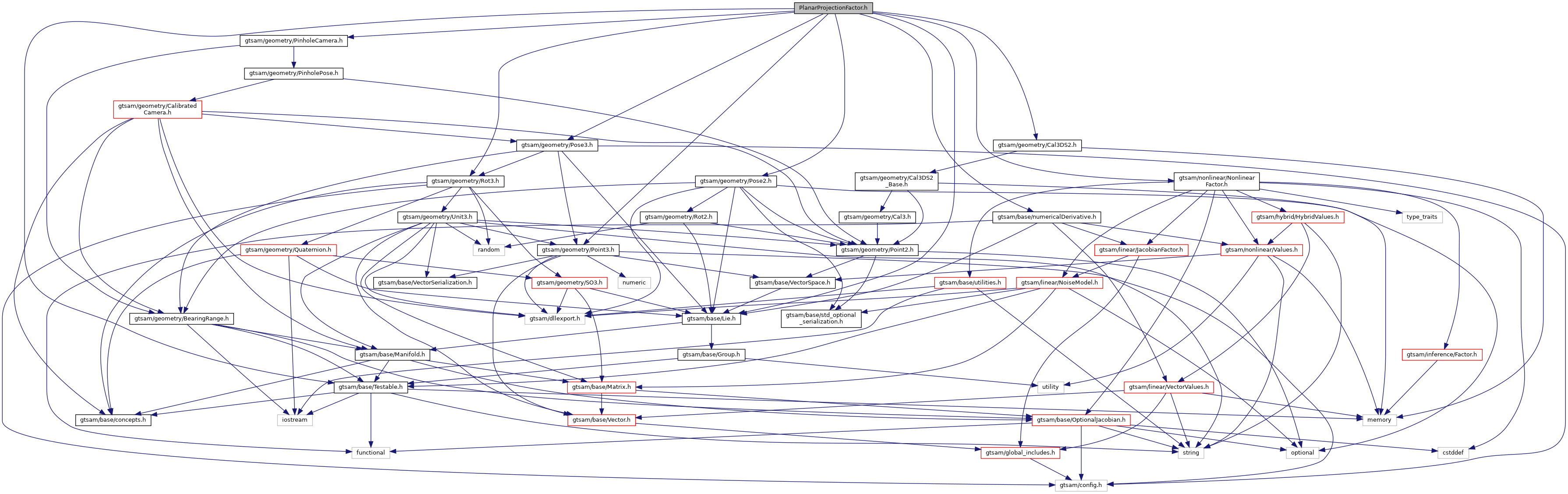
#include <gtsam/base/Testable.h>#include <gtsam/base/Lie.h>#include <gtsam/geometry/Cal3DS2.h>#include <gtsam/geometry/PinholeCamera.h>#include <gtsam/geometry/Point3.h>#include <gtsam/geometry/Pose2.h>#include <gtsam/geometry/Pose3.h>#include <gtsam/geometry/Rot3.h>#include <gtsam/nonlinear/NonlinearFactor.h>#include <gtsam/base/numericalDerivative.h>
Include dependency graph for PlanarProjectionFactor.h:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | gtsam::PlanarProjectionFactor1 |
| One variable: the pose. Landmark, camera offset, camera calibration are constant. This is intended for localization within a known map. More... | |
| class | gtsam::PlanarProjectionFactor2 |
| Two unknowns: the pose and the landmark. Camera offset and calibration are constant. This is similar to GeneralSFMFactor, used for SLAM. More... | |
| class | gtsam::PlanarProjectionFactor3 |
| Three unknowns: the pose, the camera offset, and the camera calibration. Landmark is constant. This is intended to be used for camera calibration. More... | |
| class | gtsam::PlanarProjectionFactorBase |
| Camera projection for robot on the floor. Measurement is camera pixels. More... | |
| struct | gtsam::traits< PlanarProjectionFactor1 > |
| struct | gtsam::traits< PlanarProjectionFactor2 > |
| struct | gtsam::traits< PlanarProjectionFactor3 > |
Namespaces | |
| gtsam | |
| traits | |
Detailed Description
for planar smoothing
ProjectionFactor, but with pose2 (robot on the floor)
This factor is useful for high-school robotics competitions, which run robots on the floor, with use fixed maps and fiducial markers.
- See also
- https://www.firstinspires.org/
- Date
- Dec 2, 2024
Definition in file PlanarProjectionFactor.h.