#include "ros/node_handle.h"#include "ros/time.h"#include "ros/common.h"#include "std_msgs/PointCloud.h"#include "std_msgs/ImageArray.h"#include "std_msgs/Image.h"#include <opencv/cv.h>#include <opencv/highgui.h>#include <fstream>#include "stoc.h"#include "swissranger.h"#include "flir.h"#include "tf/tf.h"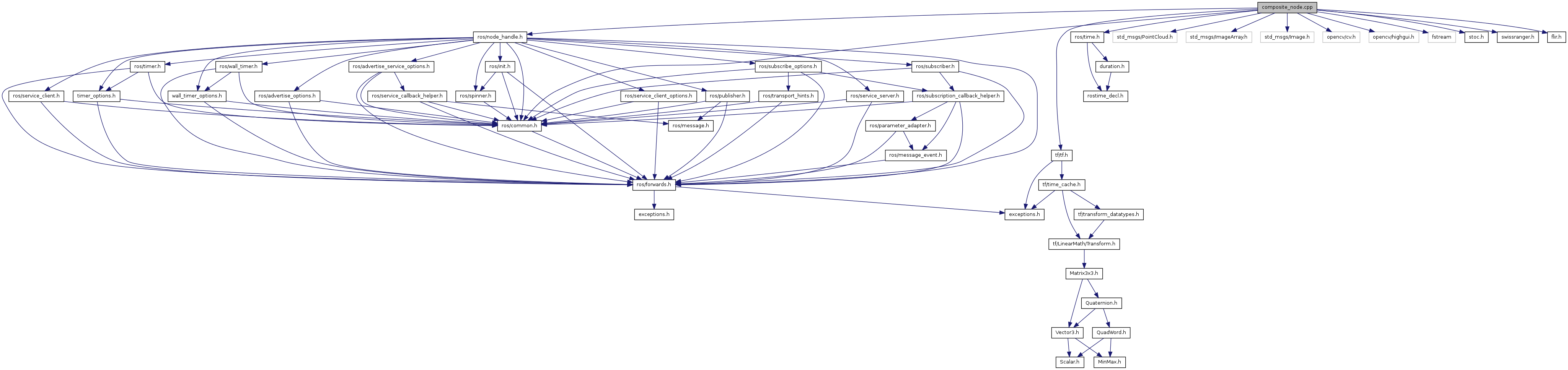
Go to the source code of this file.
Classes | |
| class | CompositeNode |
Defines | |
| #define | DEFAULT_DBL_VALUE DBL_MIN |
| #define | DEFAULT_INT_VALUE INT_MIN |
Functions | |
| int | main (int argc, char **argv) |
| #define DEFAULT_DBL_VALUE DBL_MIN |
Definition at line 113 of file composite_node.cpp.
| #define DEFAULT_INT_VALUE INT_MIN |
Definition at line 112 of file composite_node.cpp.
Definition at line 689 of file composite_node.cpp.

