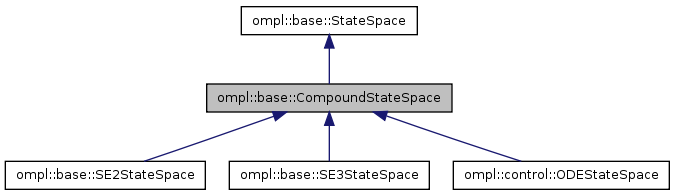
A space to allow the composition of state spaces. More...
#include <StateSpace.h>
Public Types | |
| typedef CompoundState | StateType |
| Define the type of state allocated by this state space. | |
Public Member Functions | |
| template<class T > | |
| T * | as (const std::string &name) const |
| Cast a component of this instance to a desired type. | |
| template<class T > | |
| T * | as (const unsigned int index) const |
| Cast a component of this instance to a desired type. | |
| CompoundStateSpace (const std::vector< StateSpacePtr > &components, const std::vector< double > &weights) | |
| Construct a compound state space from a list of subspaces (components) and their corresponding weights (weights). | |
| CompoundStateSpace (void) | |
| Construct an empty compound state space. | |
| virtual bool | isCompound (void) const |
| Check if the state space is compound. | |
| void | lock (void) |
| Lock this state space. This means no further spaces can be added as components. This function can be for instance called from the constructor of a state space that inherits from CompoundStateSpace to prevent the user to add further components. | |
| virtual void | printSettings (std::ostream &out) const |
| Print the settings for this state space to a stream. | |
| virtual void | printState (const State *state, std::ostream &out) const |
| Print a state to a stream. | |
| virtual void | setup (void) |
| Perform final setup steps. This function is automatically called by the SpaceInformation. If any default projections are to be registered, this call will set them. It is safe to call this function multiple times. | |
| virtual | ~CompoundStateSpace (void) |
Management of contained subspaces | |
| virtual void | addSubSpace (const StateSpacePtr &component, double weight) |
| Adds a new state space as part of the compound state space. For computing distances within the compound state space, the weight of the component also needs to be specified. | |
| const StateSpacePtr & | getSubSpace (const std::string &name) const |
| Get a specific subspace from the compound state space. | |
| const StateSpacePtr & | getSubSpace (const unsigned int index) const |
| Get a specific subspace from the compound state space. | |
| unsigned int | getSubSpaceCount (void) const |
| Get the number of state spaces that make up the compound state space. | |
| unsigned int | getSubSpaceIndex (const std::string &name) const |
| Get the index of a specific subspace from the compound state space. | |
| const std::vector < StateSpacePtr > & | getSubSpaces (void) const |
| Get the list of components. | |
| double | getSubSpaceWeight (const std::string &name) const |
| Get the weight of a subspace from the compound state space (used in distance computation). | |
| double | getSubSpaceWeight (const unsigned int index) const |
| Get the weight of a subspace from the compound state space (used in distance computation). | |
| const std::vector< double > & | getSubSpaceWeights (void) const |
| Get the list of component weights. | |
| bool | hasSubSpace (const std::string &name) const |
| Check if a specific subspace is contained in this state space. | |
| bool | isLocked (void) const |
| Return true if the state space is locked. A value of true means that no further spaces can be added as components. | |
| void | setSubSpaceWeight (const std::string &name, double weight) |
| Set the weight of a subspace in the compound state space (used in distance computation). | |
| void | setSubSpaceWeight (const unsigned int index, double weight) |
| Set the weight of a subspace in the compound state space (used in distance computation). | |
Functionality specific to the state space | |
| virtual State * | allocState (void) const |
| Allocate a state that can store a point in the described space. | |
| virtual StateSamplerPtr | allocStateSampler (void) const |
| Allocate an instance of a uniform state sampler for this space. | |
| virtual void | copyState (State *destination, const State *source) const |
| Copy a state to another. The memory of source and destination should NOT overlap. | |
| virtual double | distance (const State *state1, const State *state2) const |
| Computes distance to between two states. This value will always be between 0 and getMaximumExtent(). | |
| virtual void | enforceBounds (State *state) const |
| Bring the state within the bounds of the state space. | |
| virtual bool | equalStates (const State *state1, const State *state2) const |
| Checks whether two states are equal. | |
| virtual void | freeState (State *state) const |
| Free the memory of the allocated state. | |
| virtual unsigned int | getDimension (void) const |
| Get the dimension of the space. | |
| virtual double | getMaximumExtent (void) const |
| Get the maximum value a call to distance() can return. | |
| virtual double * | getValueAddressAtIndex (State *state, const unsigned int index) const |
| Many states contain a number of double values. This function provides a means to get the memory address of a double value from state state located at position index. The first double value is returned for index = 0. If index is too large (does not point to any double values in the state), the return value is NULL. | |
| virtual void | interpolate (const State *from, const State *to, const double t, State *state) const |
| Computes the state that lies at time t in [0, 1] on the segment that connects from state to to state. The memory location of state is not required to be different from the memory of either from or to. | |
| virtual bool | satisfiesBounds (const State *state) const |
| Check if a state is inside the bounding box. | |
| virtual void | setLongestValidSegmentFraction (double segmentFraction) |
| When performing discrete validation of motions, the length of the longest segment that does not require state validation needs to be specified. This function sets this length as a fraction of the space's maximum extent. The call is passed to all contained subspaces. | |
| virtual unsigned int | validSegmentCount (const State *state1, const State *state2) const |
| Count how many segments of the "longest valid length" fit on the motion from state1 to state2. This is the max() of the counts returned by contained subspaces. | |
Protected Member Functions | |
| void | allocStateComponents (CompoundState *state) const |
| Allocate the state components. Called by allocState(). Usually called by derived state spaces. | |
Protected Attributes | |
| unsigned int | componentCount_ |
| The number of components. | |
| std::vector< StateSpacePtr > | components_ |
| The state spaces that make up the compound state space. | |
| bool | locked_ |
| Flag indicating whether adding further components is allowed or not. | |
| std::vector< double > | weights_ |
| The weight assigned to each component of the state space when computing the compound distance. | |
A space to allow the composition of state spaces.
Definition at line 300 of file StateSpace.h.
Define the type of state allocated by this state space.
Reimplemented from ompl::base::StateSpace.
Definition at line 305 of file StateSpace.h.
| ompl::base::CompoundStateSpace::CompoundStateSpace | ( | void | ) |
Construct an empty compound state space.
| ompl::base::CompoundStateSpace::CompoundStateSpace | ( | const std::vector< StateSpacePtr > & | components, | |
| const std::vector< double > & | weights | |||
| ) |
Construct a compound state space from a list of subspaces (components) and their corresponding weights (weights).
| virtual ompl::base::CompoundStateSpace::~CompoundStateSpace | ( | void | ) | [inline, virtual] |
Definition at line 313 of file StateSpace.h.
| virtual void ompl::base::CompoundStateSpace::addSubSpace | ( | const StateSpacePtr & | component, | |
| double | weight | |||
| ) | [virtual] |
Adds a new state space as part of the compound state space. For computing distances within the compound state space, the weight of the component also needs to be specified.
| virtual State* ompl::base::CompoundStateSpace::allocState | ( | void | ) | const [virtual] |
Allocate a state that can store a point in the described space.
Implements ompl::base::StateSpace.
Reimplemented in ompl::base::SE2StateSpace, ompl::base::SE3StateSpace, and ompl::control::ODEStateSpace.
| void ompl::base::CompoundStateSpace::allocStateComponents | ( | CompoundState * | state | ) | const [protected] |
Allocate the state components. Called by allocState(). Usually called by derived state spaces.
| virtual StateSamplerPtr ompl::base::CompoundStateSpace::allocStateSampler | ( | void | ) | const [virtual] |
Allocate an instance of a uniform state sampler for this space.
Implements ompl::base::StateSpace.
| T* ompl::base::CompoundStateSpace::as | ( | const std::string & | name | ) | const [inline] |
Cast a component of this instance to a desired type.
Make sure the type we are casting to is indeed a state space
Definition at line 329 of file StateSpace.h.
| T* ompl::base::CompoundStateSpace::as | ( | const unsigned int | index | ) | const [inline] |
Cast a component of this instance to a desired type.
Make sure the type we are casting to is indeed a state space
Definition at line 319 of file StateSpace.h.
| virtual void ompl::base::CompoundStateSpace::copyState | ( | State * | destination, | |
| const State * | source | |||
| ) | const [virtual] |
Copy a state to another. The memory of source and destination should NOT overlap.
Implements ompl::base::StateSpace.
Reimplemented in ompl::control::ODEStateSpace.
| virtual double ompl::base::CompoundStateSpace::distance | ( | const State * | state1, | |
| const State * | state2 | |||
| ) | const [virtual] |
Computes distance to between two states. This value will always be between 0 and getMaximumExtent().
Implements ompl::base::StateSpace.
| virtual void ompl::base::CompoundStateSpace::enforceBounds | ( | State * | state | ) | const [virtual] |
Bring the state within the bounds of the state space.
Implements ompl::base::StateSpace.
| virtual bool ompl::base::CompoundStateSpace::equalStates | ( | const State * | state1, | |
| const State * | state2 | |||
| ) | const [virtual] |
Checks whether two states are equal.
Implements ompl::base::StateSpace.
| virtual void ompl::base::CompoundStateSpace::freeState | ( | State * | state | ) | const [virtual] |
Free the memory of the allocated state.
Implements ompl::base::StateSpace.
Reimplemented in ompl::base::SE2StateSpace, ompl::base::SE3StateSpace, and ompl::control::ODEStateSpace.
| virtual unsigned int ompl::base::CompoundStateSpace::getDimension | ( | void | ) | const [virtual] |
Get the dimension of the space.
Implements ompl::base::StateSpace.
| virtual double ompl::base::CompoundStateSpace::getMaximumExtent | ( | void | ) | const [virtual] |
Get the maximum value a call to distance() can return.
Implements ompl::base::StateSpace.
| const StateSpacePtr& ompl::base::CompoundStateSpace::getSubSpace | ( | const std::string & | name | ) | const |
Get a specific subspace from the compound state space.
| const StateSpacePtr& ompl::base::CompoundStateSpace::getSubSpace | ( | const unsigned int | index | ) | const |
Get a specific subspace from the compound state space.
| unsigned int ompl::base::CompoundStateSpace::getSubSpaceCount | ( | void | ) | const |
Get the number of state spaces that make up the compound state space.
| unsigned int ompl::base::CompoundStateSpace::getSubSpaceIndex | ( | const std::string & | name | ) | const |
Get the index of a specific subspace from the compound state space.
| const std::vector<StateSpacePtr>& ompl::base::CompoundStateSpace::getSubSpaces | ( | void | ) | const |
Get the list of components.
| double ompl::base::CompoundStateSpace::getSubSpaceWeight | ( | const std::string & | name | ) | const |
Get the weight of a subspace from the compound state space (used in distance computation).
| double ompl::base::CompoundStateSpace::getSubSpaceWeight | ( | const unsigned int | index | ) | const |
Get the weight of a subspace from the compound state space (used in distance computation).
| const std::vector<double>& ompl::base::CompoundStateSpace::getSubSpaceWeights | ( | void | ) | const |
Get the list of component weights.
| virtual double* ompl::base::CompoundStateSpace::getValueAddressAtIndex | ( | State * | state, | |
| const unsigned int | index | |||
| ) | const [virtual] |
Many states contain a number of double values. This function provides a means to get the memory address of a double value from state state located at position index. The first double value is returned for index = 0. If index is too large (does not point to any double values in the state), the return value is NULL.
Reimplemented from ompl::base::StateSpace.
| bool ompl::base::CompoundStateSpace::hasSubSpace | ( | const std::string & | name | ) | const |
Check if a specific subspace is contained in this state space.
| virtual void ompl::base::CompoundStateSpace::interpolate | ( | const State * | from, | |
| const State * | to, | |||
| const double | t, | |||
| State * | state | |||
| ) | const [virtual] |
Computes the state that lies at time t in [0, 1] on the segment that connects from state to to state. The memory location of state is not required to be different from the memory of either from or to.
Implements ompl::base::StateSpace.
| virtual bool ompl::base::CompoundStateSpace::isCompound | ( | void | ) | const [virtual] |
Check if the state space is compound.
Reimplemented from ompl::base::StateSpace.
| bool ompl::base::CompoundStateSpace::isLocked | ( | void | ) | const |
Return true if the state space is locked. A value of true means that no further spaces can be added as components.
| void ompl::base::CompoundStateSpace::lock | ( | void | ) |
Lock this state space. This means no further spaces can be added as components. This function can be for instance called from the constructor of a state space that inherits from CompoundStateSpace to prevent the user to add further components.
| virtual void ompl::base::CompoundStateSpace::printSettings | ( | std::ostream & | out | ) | const [virtual] |
Print the settings for this state space to a stream.
Reimplemented from ompl::base::StateSpace.
| virtual void ompl::base::CompoundStateSpace::printState | ( | const State * | state, | |
| std::ostream & | out | |||
| ) | const [virtual] |
Print a state to a stream.
Reimplemented from ompl::base::StateSpace.
| virtual bool ompl::base::CompoundStateSpace::satisfiesBounds | ( | const State * | state | ) | const [virtual] |
Check if a state is inside the bounding box.
Implements ompl::base::StateSpace.
| virtual void ompl::base::CompoundStateSpace::setLongestValidSegmentFraction | ( | double | segmentFraction | ) | [virtual] |
When performing discrete validation of motions, the length of the longest segment that does not require state validation needs to be specified. This function sets this length as a fraction of the space's maximum extent. The call is passed to all contained subspaces.
Reimplemented from ompl::base::StateSpace.
| void ompl::base::CompoundStateSpace::setSubSpaceWeight | ( | const std::string & | name, | |
| double | weight | |||
| ) |
Set the weight of a subspace in the compound state space (used in distance computation).
| void ompl::base::CompoundStateSpace::setSubSpaceWeight | ( | const unsigned int | index, | |
| double | weight | |||
| ) |
Set the weight of a subspace in the compound state space (used in distance computation).
| virtual void ompl::base::CompoundStateSpace::setup | ( | void | ) | [virtual] |
Perform final setup steps. This function is automatically called by the SpaceInformation. If any default projections are to be registered, this call will set them. It is safe to call this function multiple times.
Reimplemented from ompl::base::StateSpace.
| virtual unsigned int ompl::base::CompoundStateSpace::validSegmentCount | ( | const State * | state1, | |
| const State * | state2 | |||
| ) | const [virtual] |
Count how many segments of the "longest valid length" fit on the motion from state1 to state2. This is the max() of the counts returned by contained subspaces.
Reimplemented from ompl::base::StateSpace.
unsigned int ompl::base::CompoundStateSpace::componentCount_ [protected] |
The number of components.
Definition at line 448 of file StateSpace.h.
std::vector<StateSpacePtr> ompl::base::CompoundStateSpace::components_ [protected] |
The state spaces that make up the compound state space.
Definition at line 445 of file StateSpace.h.
bool ompl::base::CompoundStateSpace::locked_ [protected] |
Flag indicating whether adding further components is allowed or not.
Definition at line 454 of file StateSpace.h.
std::vector<double> ompl::base::CompoundStateSpace::weights_ [protected] |
The weight assigned to each component of the state space when computing the compound distance.
Definition at line 451 of file StateSpace.h.

