|
| auto & | data () |
| |
| const auto & | data () const |
| |
| std::size_t | height () const |
| |
| const Sophus::SE2d & | origin () const |
| |
| double | resolution () const |
| |
| std::size_t | size () const |
| |
| | StaticOccupancyGrid (std::array< bool, Rows *Cols > array, double resolution=1.0, const Sophus::SE2d &origin=Sophus::SE2d{}) |
| |
| auto | value_traits () const |
| |
| std::size_t | width () const |
| |
| auto | coordinates_at (std::size_t index, Frame frame) const |
| | Compute plane coordinates given grid cell coordinates. More...
|
| |
| auto | coordinates_for (Range &&cells, Frame frame) const |
| | Compute plane coordinates for a range of grid cells. More...
|
| |
| bool | free_at (const Eigen::Vector2i &pi) const |
| | Checks if cell is free. More...
|
| |
| bool | free_at (int xi, int yi) const |
| | Checks if cell is free. More...
|
| |
| bool | free_at (std::size_t index) const |
| | Checks if cell is free. More...
|
| |
| auto | free_cells () const |
| | Retrieves range of free grid cell indices. More...
|
| |
| bool | free_near (const Eigen::Vector2d &p) const |
| | Checks if nearest cell is free. More...
|
| |
| bool | free_near (double x, double y) const |
| | Checks if nearest cell is free. More...
|
| |
| auto | obstacle_data () const |
| | Retrieves grid data using true booleans for obstacles. More...
|
| |
| Eigen::Vector2d | coordinates_at (std::size_t index) const |
| | Compute plane coordinates given a grid cell index. More...
|
| |
| auto | data_at (std::size_t index) const |
| | Gets cell data, if included. More...
|
| |
| std::size_t | index_at (const Eigen::Vector2i &pi) const |
| | Computes index for given grid cell coordinates. More...
|
| |
| std::size_t | index_at (int xi, int yi) const |
| | Computes index for given grid cell coordinates. More...
|
| |
| auto | neighborhood4 (std::size_t index) const |
| | Computes 4-connected neighborhood for cell. More...
|
| |
| bool | contains (const Eigen::Vector2i &pi) const |
| | Checks if a cell is included in the grid. More...
|
| |
| bool | contains (int xi, int yi) const |
| | Checks if a cell is included in the grid. More...
|
| |
| auto | data_at (const Eigen::Vector2i &pi) const |
| | Gets cell data, if included. More...
|
| |
| auto | data_at (int xi, int yi) const |
| | Gets cell data, if included. More...
|
| |
| auto | data_near (const Eigen::Vector2d &p) const |
| | Gets nearest cell data, if included. More...
|
| |
| auto | data_near (double x, double y) const |
| | Gets nearest cell data, if included. More...
|
| |
| auto | neighborhood4 (const Eigen::Vector2i &pi) const |
| | Computes 4-connected neighborhood for cell. More...
|
| |
| auto | neighborhood4 (int xi, int yi) const |
| | Computes 4-connected neighborhood for cell. More...
|
| |
| Eigen::Vector< int, NDim > | cell_near (const Eigen::Vector< double, NDim > &p) const |
| | Compute nearest grid cell coordinates given plane coordinates. More...
|
| |
| Eigen::Vector< double, NDim > | coordinates_at (const Eigen::Vector< int, NDim > &pi) const |
| | Compute plane coordinates given grid cell coordinates. More...
|
| |
| template<class Range > |
| auto | coordinates_for (Range &&cells) const |
| | Compute plane coordinates given a range of cell coordinates. More...
|
| |
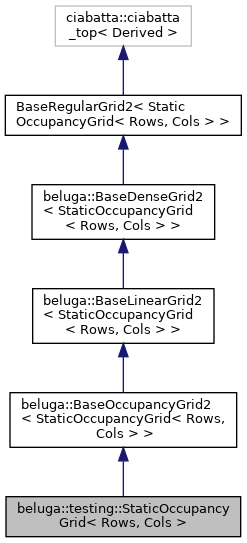
template<std::size_t Rows, std::size_t Cols>
class beluga::testing::StaticOccupancyGrid< Rows, Cols >
Definition at line 28 of file static_occupancy_grid.hpp.
 Public Member Functions inherited from beluga::BaseOccupancyGrid2< StaticOccupancyGrid< Rows, Cols > >
Public Member Functions inherited from beluga::BaseOccupancyGrid2< StaticOccupancyGrid< Rows, Cols > >