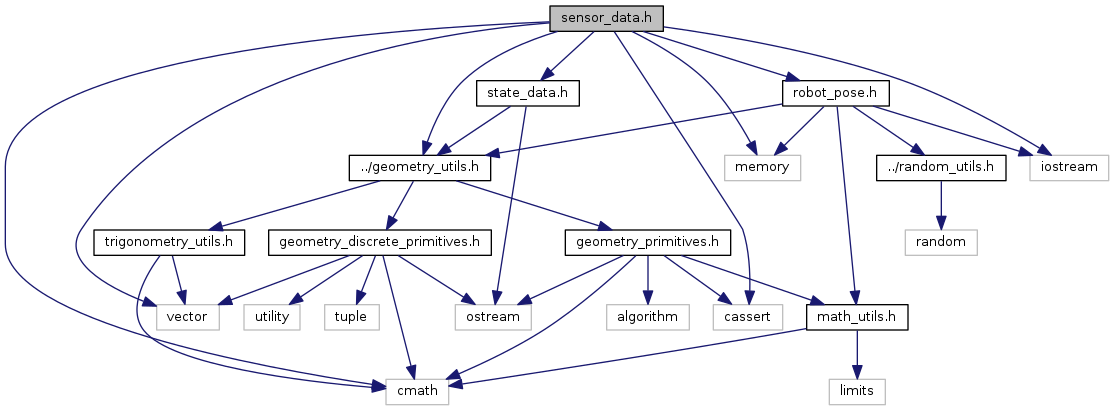
#include <cassert>#include <cmath>#include <memory>#include <vector>#include <iostream>#include "state_data.h"#include "robot_pose.h"#include "../geometry_utils.h"
Include dependency graph for sensor_data.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| struct | LaserScan2D |
| union | ScanPoint2D::PointData |
| struct | ScanPoint2D::PointData::PolarPoint |
| struct | ScanPoint2D |
| struct | TransformedLaserScan |
Functions | |
| std::ostream & | operator<< (std::ostream &osm, const ScanPoint2D &sp) |
Function Documentation
|
inline |
Definition at line 139 of file sensor_data.h.