#include <JointControlCommandInterface.h>
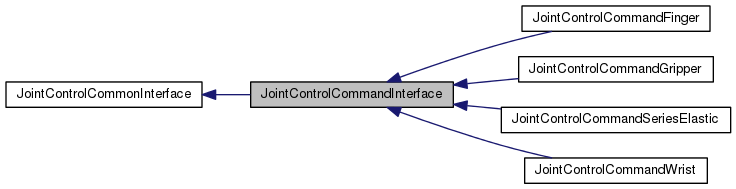
Inheritance diagram for JointControlCommandInterface:
Public Member Functions | |
| virtual void | actuator (void)=0 |
| virtual void | bootLoader (void)=0 |
| virtual void | disableCalibrationMode (void)=0 |
| virtual void | disableClearFaultMode (void)=0 |
| virtual void | drive (void)=0 |
| virtual void | enableCalibrationMode (void)=0 |
| virtual void | enableClearFaultMode (void)=0 |
| virtual void | getStates (r2_msgs::JointControlData &)=0 |
| virtual void | motCom (void)=0 |
| virtual void | multiLoopSmooth (void)=0 |
| virtual void | multiLoopStep (void)=0 |
| virtual void | neutral (void)=0 |
| virtual void | off (void)=0 |
| virtual void | park (void)=0 |
| virtual void | resetCalibrationMode (void)=0 |
| virtual void | stallMode (void)=0 |
Protected Member Functions | |
| JointControlCommandInterface (const std::string &mechanism, IoFunctions io) | |
| virtual void | setParameters ()=0 |
| virtual | ~JointControlCommandInterface () |
Protected Attributes | |
| r2_msgs::JointControlData | states |
Detailed Description
Definition at line 16 of file JointControlCommandInterface.h.
Constructor & Destructor Documentation
| JointControlCommandInterface::JointControlCommandInterface | ( | const std::string & | mechanism, |
| IoFunctions | io | ||
| ) | [inline, protected] |
Definition at line 47 of file JointControlCommandInterface.h.
| virtual JointControlCommandInterface::~JointControlCommandInterface | ( | ) | [inline, protected, virtual] |
Definition at line 50 of file JointControlCommandInterface.h.
Member Function Documentation
| virtual void JointControlCommandInterface::actuator | ( | void | ) | [pure virtual] |
| virtual void JointControlCommandInterface::bootLoader | ( | void | ) | [pure virtual] |
| virtual void JointControlCommandInterface::disableCalibrationMode | ( | void | ) | [pure virtual] |
| virtual void JointControlCommandInterface::disableClearFaultMode | ( | void | ) | [pure virtual] |
| virtual void JointControlCommandInterface::drive | ( | void | ) | [pure virtual] |
| virtual void JointControlCommandInterface::enableCalibrationMode | ( | void | ) | [pure virtual] |
| virtual void JointControlCommandInterface::enableClearFaultMode | ( | void | ) | [pure virtual] |
| virtual void JointControlCommandInterface::getStates | ( | r2_msgs::JointControlData & | ) | [pure virtual] |
| virtual void JointControlCommandInterface::motCom | ( | void | ) | [pure virtual] |
| virtual void JointControlCommandInterface::multiLoopSmooth | ( | void | ) | [pure virtual] |
| virtual void JointControlCommandInterface::multiLoopStep | ( | void | ) | [pure virtual] |
| virtual void JointControlCommandInterface::neutral | ( | void | ) | [pure virtual] |
| virtual void JointControlCommandInterface::off | ( | void | ) | [pure virtual] |
| virtual void JointControlCommandInterface::park | ( | void | ) | [pure virtual] |
| virtual void JointControlCommandInterface::resetCalibrationMode | ( | void | ) | [pure virtual] |
| virtual void JointControlCommandInterface::setParameters | ( | ) | [protected, pure virtual] |
| virtual void JointControlCommandInterface::stallMode | ( | void | ) | [pure virtual] |
Member Data Documentation
r2_msgs::JointControlData JointControlCommandInterface::states [protected] |
Definition at line 45 of file JointControlCommandInterface.h.
The documentation for this class was generated from the following file: