#include <RosMsgTreeFk.h>
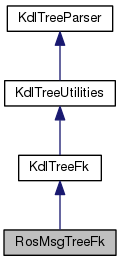
Inheritance diagram for RosMsgTreeFk:
Public Member Functions | |
| bool | getPoseState (const sensor_msgs::JointState &jointState, r2_msgs::PoseState &poseState) |
| virtual void | initialize () |
| initialize called by both of the load functions, allowing derived classes to perform additional initialization after the tree is loaded | |
| void | reset () |
| RosMsgTreeFk () | |
| ~RosMsgTreeFk () | |
Private Types | |
| typedef std::map< std::string, std::pair< ros::Time, geometry_msgs::Twist > > | prevVel_type |
Private Attributes | |
| std::vector< std::string > | jointNames |
| KDL::JntArrayVel | joints |
| std::map< std::string, KDL::FrameVel > | poseMap |
| prevVel_type | prevVel |
Detailed Description
Definition at line 15 of file RosMsgTreeFk.h.
Member Typedef Documentation
typedef std::map<std::string, std::pair<ros::Time, geometry_msgs::Twist> > RosMsgTreeFk::prevVel_type [private] |
Definition at line 34 of file RosMsgTreeFk.h.
Constructor & Destructor Documentation
Definition at line 3 of file RosMsgTreeFk.cpp.
Definition at line 8 of file RosMsgTreeFk.cpp.
Member Function Documentation
| bool RosMsgTreeFk::getPoseState | ( | const sensor_msgs::JointState & | jointState, |
| r2_msgs::PoseState & | poseState | ||
| ) |
| void RosMsgTreeFk::initialize | ( | ) | [virtual] |
initialize called by both of the load functions, allowing derived classes to perform additional initialization after the tree is loaded
Reimplemented from KdlTreeFk.
Definition at line 12 of file RosMsgTreeFk.cpp.
| void RosMsgTreeFk::reset | ( | ) | [inline] |
Definition at line 21 of file RosMsgTreeFk.h.
Member Data Documentation
std::vector<std::string> RosMsgTreeFk::jointNames [private] |
Definition at line 36 of file RosMsgTreeFk.h.
KDL::JntArrayVel RosMsgTreeFk::joints [private] |
Definition at line 37 of file RosMsgTreeFk.h.
std::map<std::string, KDL::FrameVel> RosMsgTreeFk::poseMap [private] |
Definition at line 38 of file RosMsgTreeFk.h.
prevVel_type RosMsgTreeFk::prevVel [private] |
Definition at line 35 of file RosMsgTreeFk.h.
The documentation for this class was generated from the following files: