Controller for executing joint-space trajectories on a group of joints. More...
#include <joint_trajectory_controller.h>
Classes | |
| struct | TimeData |
Public Member Functions | |
| JointTrajectoryController () | |
Non Real-Time Safe Functions | |
| bool | init (HardwareInterface *hw, ros::NodeHandle &root_nh, ros::NodeHandle &controller_nh) |
Real-Time Safe Functions | |
| void | starting (const ros::Time &time) |
| Holds the current position. | |
| void | stopping (const ros::Time &time) |
| Cancels the active action goal, if any. | |
| void | update (const ros::Time &time, const ros::Duration &period) |
Private Types | |
| typedef actionlib::ActionServer < control_msgs::FollowJointTrajectoryAction > | ActionServer |
| typedef boost::shared_ptr < ActionServer > | ActionServerPtr |
| typedef ActionServer::GoalHandle | GoalHandle |
| typedef HardwareInterfaceAdapter < HardwareInterface, typename Segment::State > | HwIfaceAdapter |
| typedef HardwareInterface::ResourceHandleType | JointHandle |
| typedef trajectory_msgs::JointTrajectory::ConstPtr | JointTrajectoryConstPtr |
| typedef realtime_tools::RealtimeServerGoalHandle < control_msgs::FollowJointTrajectoryAction > | RealtimeGoalHandle |
| typedef boost::shared_ptr < RealtimeGoalHandle > | RealtimeGoalHandlePtr |
| typedef Segment::Scalar | Scalar |
| typedef JointTrajectorySegment < SegmentImpl > | Segment |
| typedef realtime_tools::RealtimePublisher < control_msgs::JointTrajectoryControllerState > | StatePublisher |
| typedef boost::scoped_ptr < StatePublisher > | StatePublisherPtr |
| typedef std::vector< Segment > | Trajectory |
| typedef realtime_tools::RealtimeBox < TrajectoryPtr > | TrajectoryBox |
| typedef boost::shared_ptr < Trajectory > | TrajectoryPtr |
Private Member Functions | |
| void | cancelCB (GoalHandle gh) |
| void | checkGoalTolerances (const typename Segment::State &state_error, const Segment &segment) |
| Check goal tolerances. | |
| void | checkPathTolerances (const typename Segment::State &state_error, const Segment &segment) |
| Check path tolerances. | |
| void | goalCB (GoalHandle gh) |
| void | preemptActiveGoal () |
| void | publishState (const ros::Time &time) |
| Publish current controller state at a throttled frequency. | |
| bool | queryStateService (control_msgs::QueryTrajectoryState::Request &req, control_msgs::QueryTrajectoryState::Response &resp) |
| void | setHoldPosition (const ros::Time &time) |
| Hold the current position. | |
| void | trajectoryCommandCB (const JointTrajectoryConstPtr &msg) |
| bool | updateTrajectoryCommand (const JointTrajectoryConstPtr &msg, RealtimeGoalHandlePtr gh) |
Private Attributes | |
| ros::Duration | action_monitor_period_ |
| ActionServerPtr | action_server_ |
| std::vector< bool > | angle_wraparound_ |
| Whether controlled joints wrap around or not. | |
| ros::NodeHandle | controller_nh_ |
| TrajectoryBox | curr_trajectory_box_ |
| Segment::State | current_state_ |
| Preallocated workspace variable. | |
| SegmentTolerances< Scalar > | default_tolerances_ |
| Default trajectory segment tolerances. | |
| Segment::State | desired_state_ |
| Preallocated workspace variable. | |
| ros::Timer | goal_handle_timer_ |
| Segment::State | hold_end_state_ |
| Preallocated workspace variable. | |
| Segment::State | hold_start_state_ |
| Preallocated workspace variable. | |
| TrajectoryPtr | hold_trajectory_ptr_ |
| Last hold trajectory values. | |
| HwIfaceAdapter | hw_iface_adapter_ |
| Adapts desired trajectory state to HW interface. | |
| std::vector< std::string > | joint_names_ |
| Controlled joint names. | |
| std::vector< JointHandle > | joints_ |
| Handles to controlled joints. | |
| ros::Time | last_state_publish_time_ |
| std::string | name_ |
| Controller name. | |
| ros::ServiceServer | query_state_service_ |
| RealtimeGoalHandlePtr | rt_active_goal_ |
| Currently active action goal, if any. | |
| Segment::State | state_error_ |
| Preallocated workspace variable. | |
| StatePublisherPtr | state_publisher_ |
| ros::Duration | state_publisher_period_ |
| Segment::Time | stop_trajectory_duration_ |
| realtime_tools::RealtimeBuffer < TimeData > | time_data_ |
| ros::Subscriber | trajectory_command_sub_ |
| bool | verbose_ |
| Hard coded verbose flag to help in debugging. | |
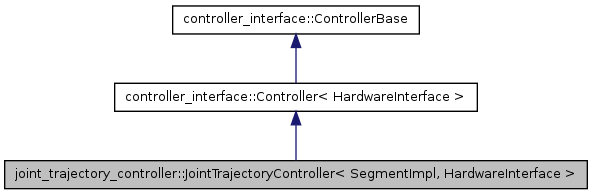
Detailed Description
template<class SegmentImpl, class HardwareInterface>
class joint_trajectory_controller::JointTrajectoryController< SegmentImpl, HardwareInterface >
Controller for executing joint-space trajectories on a group of joints.
- Note:
- Non-developer documentation and usage instructions can be found in the package's ROS wiki page.
- Template Parameters:
-
SegmentImpl Trajectory segment representation to use. The type must comply with the following structure: class FooSegment { public: // Required types typedef double Scalar; // Scalar can be anything convertible to double typedef Scalar Time; typedef PosVelAccState<Scalar> State; // Default constructor FooSegment(); // Constructor from start and end states (boundary conditions) FooSegment(const Time& start_time, const State& start_state, const Time& end_time, const State& end_state); // Start and end states initializer (the guts of the above constructor) // May throw std::invalid_argument if parameters are invalid void init(const Time& start_time, const State& start_state, const Time& end_time, const State& end_state); // Sampler (realtime-safe) void sample(const Time& time, State& state) const; // Accesors (realtime-safe) Time startTime() const; Time endTime() const; unsigned int size() const; };
HardwareInterface Controller hardware interface. Currently hardware_interface::PositionJointInterfaceandhardware_interface::EffortJointInterfaceare supported out-of-the-box.
Definition at line 125 of file joint_trajectory_controller.h.
Member Typedef Documentation
typedef actionlib::ActionServer<control_msgs::FollowJointTrajectoryAction> joint_trajectory_controller::JointTrajectoryController< SegmentImpl, HardwareInterface >::ActionServer [private] |
Definition at line 158 of file joint_trajectory_controller.h.
typedef boost::shared_ptr<ActionServer> joint_trajectory_controller::JointTrajectoryController< SegmentImpl, HardwareInterface >::ActionServerPtr [private] |
Definition at line 159 of file joint_trajectory_controller.h.
typedef ActionServer::GoalHandle joint_trajectory_controller::JointTrajectoryController< SegmentImpl, HardwareInterface >::GoalHandle [private] |
Definition at line 160 of file joint_trajectory_controller.h.
typedef HardwareInterfaceAdapter<HardwareInterface, typename Segment::State> joint_trajectory_controller::JointTrajectoryController< SegmentImpl, HardwareInterface >::HwIfaceAdapter [private] |
Definition at line 173 of file joint_trajectory_controller.h.
typedef HardwareInterface::ResourceHandleType joint_trajectory_controller::JointTrajectoryController< SegmentImpl, HardwareInterface >::JointHandle [private] |
Definition at line 174 of file joint_trajectory_controller.h.
typedef trajectory_msgs::JointTrajectory::ConstPtr joint_trajectory_controller::JointTrajectoryController< SegmentImpl, HardwareInterface >::JointTrajectoryConstPtr [private] |
Definition at line 163 of file joint_trajectory_controller.h.
typedef realtime_tools::RealtimeServerGoalHandle<control_msgs::FollowJointTrajectoryAction> joint_trajectory_controller::JointTrajectoryController< SegmentImpl, HardwareInterface >::RealtimeGoalHandle [private] |
Definition at line 161 of file joint_trajectory_controller.h.
typedef boost::shared_ptr<RealtimeGoalHandle> joint_trajectory_controller::JointTrajectoryController< SegmentImpl, HardwareInterface >::RealtimeGoalHandlePtr [private] |
Definition at line 162 of file joint_trajectory_controller.h.
typedef Segment::Scalar joint_trajectory_controller::JointTrajectoryController< SegmentImpl, HardwareInterface >::Scalar [private] |
Definition at line 171 of file joint_trajectory_controller.h.
typedef JointTrajectorySegment<SegmentImpl> joint_trajectory_controller::JointTrajectoryController< SegmentImpl, HardwareInterface >::Segment [private] |
Definition at line 167 of file joint_trajectory_controller.h.
typedef realtime_tools::RealtimePublisher<control_msgs::JointTrajectoryControllerState> joint_trajectory_controller::JointTrajectoryController< SegmentImpl, HardwareInterface >::StatePublisher [private] |
Definition at line 164 of file joint_trajectory_controller.h.
typedef boost::scoped_ptr<StatePublisher> joint_trajectory_controller::JointTrajectoryController< SegmentImpl, HardwareInterface >::StatePublisherPtr [private] |
Definition at line 165 of file joint_trajectory_controller.h.
typedef std::vector<Segment> joint_trajectory_controller::JointTrajectoryController< SegmentImpl, HardwareInterface >::Trajectory [private] |
Definition at line 168 of file joint_trajectory_controller.h.
typedef realtime_tools::RealtimeBox<TrajectoryPtr> joint_trajectory_controller::JointTrajectoryController< SegmentImpl, HardwareInterface >::TrajectoryBox [private] |
Definition at line 170 of file joint_trajectory_controller.h.
typedef boost::shared_ptr<Trajectory> joint_trajectory_controller::JointTrajectoryController< SegmentImpl, HardwareInterface >::TrajectoryPtr [private] |
Definition at line 169 of file joint_trajectory_controller.h.
Constructor & Destructor Documentation
| joint_trajectory_controller::JointTrajectoryController< SegmentImpl, HardwareInterface >::JointTrajectoryController | ( | ) |
Definition at line 238 of file joint_trajectory_controller_impl.h.
Member Function Documentation
| void joint_trajectory_controller::JointTrajectoryController< SegmentImpl, HardwareInterface >::cancelCB | ( | GoalHandle | gh | ) | [private] |
Definition at line 583 of file joint_trajectory_controller_impl.h.
| void joint_trajectory_controller::JointTrajectoryController< SegmentImpl, HardwareInterface >::checkGoalTolerances | ( | const typename Segment::State & | state_error, |
| const Segment & | segment | ||
| ) | [inline, private] |
Check goal tolerances.
If goal tolerances are fulfilled, the currently active action goal will be considered successful. If they are violated, the action goal will be aborted.
- Parameters:
-
state_error Error between the current and desired trajectory states. segment Currently active trajectory segment.
- Precondition:
segmentis associated to the active goal handle.
Definition at line 200 of file joint_trajectory_controller_impl.h.
| void joint_trajectory_controller::JointTrajectoryController< SegmentImpl, HardwareInterface >::checkPathTolerances | ( | const typename Segment::State & | state_error, |
| const Segment & | segment | ||
| ) | [inline, private] |
Check path tolerances.
If path tolerances are violated, the currently active action goal will be aborted.
- Parameters:
-
state_error Error between the current and desired trajectory states. segment Currently active trajectory segment.
- Precondition:
segmentis associated to the active goal handle.
Definition at line 184 of file joint_trajectory_controller_impl.h.
| void joint_trajectory_controller::JointTrajectoryController< SegmentImpl, HardwareInterface >::goalCB | ( | GoalHandle | gh | ) | [private] |
Definition at line 527 of file joint_trajectory_controller_impl.h.
| bool joint_trajectory_controller::JointTrajectoryController< SegmentImpl, HardwareInterface >::init | ( | HardwareInterface * | hw, |
| ros::NodeHandle & | root_nh, | ||
| ros::NodeHandle & | controller_nh | ||
| ) | [virtual] |
Reimplemented from controller_interface::Controller< HardwareInterface >.
Definition at line 244 of file joint_trajectory_controller_impl.h.
| void joint_trajectory_controller::JointTrajectoryController< SegmentImpl, HardwareInterface >::preemptActiveGoal | ( | ) | [inline, private] |
Definition at line 169 of file joint_trajectory_controller_impl.h.
| void joint_trajectory_controller::JointTrajectoryController< SegmentImpl, HardwareInterface >::publishState | ( | const ros::Time & | time | ) | [private] |
Publish current controller state at a throttled frequency.
- Note:
- This method is realtime-safe and is meant to be called from update, as it shares data with it without any locking.
Definition at line 646 of file joint_trajectory_controller_impl.h.
| bool joint_trajectory_controller::JointTrajectoryController< SegmentImpl, HardwareInterface >::queryStateService | ( | control_msgs::QueryTrajectoryState::Request & | req, |
| control_msgs::QueryTrajectoryState::Response & | resp | ||
| ) | [private] |
Definition at line 607 of file joint_trajectory_controller_impl.h.
| void joint_trajectory_controller::JointTrajectoryController< SegmentImpl, HardwareInterface >::setHoldPosition | ( | const ros::Time & | time | ) | [private] |
Hold the current position.
Substitutes the current trajectory with a single-segment one going from the current position and velocity to the current position and zero velocity.
- Note:
- This method is realtime-safe.
Definition at line 671 of file joint_trajectory_controller_impl.h.
| void joint_trajectory_controller::JointTrajectoryController< SegmentImpl, HardwareInterface >::starting | ( | const ros::Time & | time | ) | [inline, virtual] |
Holds the current position.
Reimplemented from controller_interface::ControllerBase.
Definition at line 134 of file joint_trajectory_controller_impl.h.
| void joint_trajectory_controller::JointTrajectoryController< SegmentImpl, HardwareInterface >::stopping | ( | const ros::Time & | time | ) | [inline, virtual] |
Cancels the active action goal, if any.
Reimplemented from controller_interface::ControllerBase.
Definition at line 154 of file joint_trajectory_controller_impl.h.
| void joint_trajectory_controller::JointTrajectoryController< SegmentImpl, HardwareInterface >::trajectoryCommandCB | ( | const JointTrajectoryConstPtr & | msg | ) | [inline, private] |
Definition at line 161 of file joint_trajectory_controller_impl.h.
| void joint_trajectory_controller::JointTrajectoryController< SegmentImpl, HardwareInterface >::update | ( | const ros::Time & | time, |
| const ros::Duration & | period | ||
| ) | [virtual] |
Implements controller_interface::ControllerBase.
Definition at line 374 of file joint_trajectory_controller_impl.h.
| bool joint_trajectory_controller::JointTrajectoryController< SegmentImpl, HardwareInterface >::updateTrajectoryCommand | ( | const JointTrajectoryConstPtr & | msg, |
| RealtimeGoalHandlePtr | gh | ||
| ) | [private] |
Definition at line 450 of file joint_trajectory_controller_impl.h.
Member Data Documentation
ros::Duration joint_trajectory_controller::JointTrajectoryController< SegmentImpl, HardwareInterface >::action_monitor_period_ [private] |
Definition at line 205 of file joint_trajectory_controller.h.
ActionServerPtr joint_trajectory_controller::JointTrajectoryController< SegmentImpl, HardwareInterface >::action_server_ [private] |
Definition at line 212 of file joint_trajectory_controller.h.
std::vector<bool> joint_trajectory_controller::JointTrajectoryController< SegmentImpl, HardwareInterface >::angle_wraparound_ [private] |
Whether controlled joints wrap around or not.
Definition at line 179 of file joint_trajectory_controller.h.
ros::NodeHandle joint_trajectory_controller::JointTrajectoryController< SegmentImpl, HardwareInterface >::controller_nh_ [private] |
Definition at line 210 of file joint_trajectory_controller.h.
TrajectoryBox joint_trajectory_controller::JointTrajectoryController< SegmentImpl, HardwareInterface >::curr_trajectory_box_ [private] |
Thread-safe container with a smart pointer to trajectory currently being followed. Can be either a hold trajectory or a trajectory received from a ROS message.
We store the hold trajectory in a separate class member because the starting(time) method must be realtime-safe. The (single segment) hold trajectory is preallocated at initialization time and its size is kept unchanged.
Definition at line 193 of file joint_trajectory_controller.h.
Segment::State joint_trajectory_controller::JointTrajectoryController< SegmentImpl, HardwareInterface >::current_state_ [private] |
Preallocated workspace variable.
Definition at line 196 of file joint_trajectory_controller.h.
SegmentTolerances<Scalar> joint_trajectory_controller::JointTrajectoryController< SegmentImpl, HardwareInterface >::default_tolerances_ [private] |
Default trajectory segment tolerances.
Definition at line 181 of file joint_trajectory_controller.h.
Segment::State joint_trajectory_controller::JointTrajectoryController< SegmentImpl, HardwareInterface >::desired_state_ [private] |
Preallocated workspace variable.
Definition at line 197 of file joint_trajectory_controller.h.
ros::Timer joint_trajectory_controller::JointTrajectoryController< SegmentImpl, HardwareInterface >::goal_handle_timer_ [private] |
Definition at line 216 of file joint_trajectory_controller.h.
Segment::State joint_trajectory_controller::JointTrajectoryController< SegmentImpl, HardwareInterface >::hold_end_state_ [private] |
Preallocated workspace variable.
Definition at line 200 of file joint_trajectory_controller.h.
Segment::State joint_trajectory_controller::JointTrajectoryController< SegmentImpl, HardwareInterface >::hold_start_state_ [private] |
Preallocated workspace variable.
Definition at line 199 of file joint_trajectory_controller.h.
TrajectoryPtr joint_trajectory_controller::JointTrajectoryController< SegmentImpl, HardwareInterface >::hold_trajectory_ptr_ [private] |
Last hold trajectory values.
Definition at line 194 of file joint_trajectory_controller.h.
HwIfaceAdapter joint_trajectory_controller::JointTrajectoryController< SegmentImpl, HardwareInterface >::hw_iface_adapter_ [private] |
Adapts desired trajectory state to HW interface.
Definition at line 182 of file joint_trajectory_controller.h.
std::vector<std::string> joint_trajectory_controller::JointTrajectoryController< SegmentImpl, HardwareInterface >::joint_names_ [private] |
Controlled joint names.
Definition at line 180 of file joint_trajectory_controller.h.
std::vector<JointHandle> joint_trajectory_controller::JointTrajectoryController< SegmentImpl, HardwareInterface >::joints_ [private] |
Handles to controlled joints.
Definition at line 178 of file joint_trajectory_controller.h.
ros::Time joint_trajectory_controller::JointTrajectoryController< SegmentImpl, HardwareInterface >::last_state_publish_time_ [private] |
Definition at line 217 of file joint_trajectory_controller.h.
std::string joint_trajectory_controller::JointTrajectoryController< SegmentImpl, HardwareInterface >::name_ [private] |
Controller name.
Definition at line 177 of file joint_trajectory_controller.h.
ros::ServiceServer joint_trajectory_controller::JointTrajectoryController< SegmentImpl, HardwareInterface >::query_state_service_ [private] |
Definition at line 213 of file joint_trajectory_controller.h.
RealtimeGoalHandlePtr joint_trajectory_controller::JointTrajectoryController< SegmentImpl, HardwareInterface >::rt_active_goal_ [private] |
Currently active action goal, if any.
Definition at line 184 of file joint_trajectory_controller.h.
Segment::State joint_trajectory_controller::JointTrajectoryController< SegmentImpl, HardwareInterface >::state_error_ [private] |
Preallocated workspace variable.
Definition at line 198 of file joint_trajectory_controller.h.
StatePublisherPtr joint_trajectory_controller::JointTrajectoryController< SegmentImpl, HardwareInterface >::state_publisher_ [private] |
Definition at line 214 of file joint_trajectory_controller.h.
ros::Duration joint_trajectory_controller::JointTrajectoryController< SegmentImpl, HardwareInterface >::state_publisher_period_ [private] |
Definition at line 204 of file joint_trajectory_controller.h.
Segment::Time joint_trajectory_controller::JointTrajectoryController< SegmentImpl, HardwareInterface >::stop_trajectory_duration_ [private] |
Definition at line 207 of file joint_trajectory_controller.h.
realtime_tools::RealtimeBuffer<TimeData> joint_trajectory_controller::JointTrajectoryController< SegmentImpl, HardwareInterface >::time_data_ [private] |
Definition at line 202 of file joint_trajectory_controller.h.
ros::Subscriber joint_trajectory_controller::JointTrajectoryController< SegmentImpl, HardwareInterface >::trajectory_command_sub_ [private] |
Definition at line 211 of file joint_trajectory_controller.h.
bool joint_trajectory_controller::JointTrajectoryController< SegmentImpl, HardwareInterface >::verbose_ [private] |
Hard coded verbose flag to help in debugging.
Definition at line 176 of file joint_trajectory_controller.h.
The documentation for this class was generated from the following files: