#include <ros/ros.h>#include <rosbag/bag.h>#include <rosbag/view.h>#include <rosbag/message_instance.h>#include <sensor_msgs/PointCloud2.h>#include <pcl_ros/point_cloud.h>#include <pcl/point_cloud.h>#include <pcl/point_types.h>#include <pcl/filters/passthrough.h>#include <pcl/filters/conditional_removal.h>#include <pcl/filters/extract_indices.h>#include <boost/format.hpp>#include <boost/make_shared.hpp>#include <boost/foreach.hpp>#include <eigen_conversions/eigen_msg.h>#include <Eigen/Eigen>
Include dependency graph for pcl_basic.h:

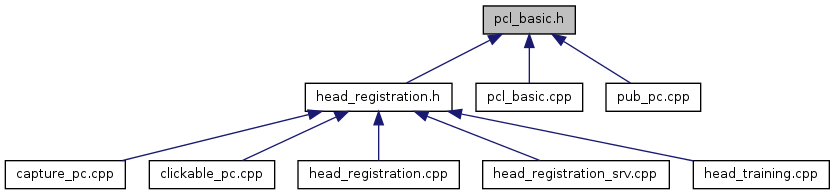
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Typedefs | |
| typedef pcl::PointCloud< PRGB > | PCRGB |
| typedef pcl::PointXYZRGB | PRGB |
Functions | |
| void | boxFilter (const PCRGB &in_pc, PCRGB &out_pc, double min_x, double max_x, double min_y, double max_y, double min_z, double max_z) |
| void | extractIndices (const PCRGB::Ptr &in_pc, pcl::IndicesPtr &inds, PCRGB::Ptr &out_pc, bool is_negative=false) |
| void | pubLoop (PCRGB::Ptr &pc, const std::string &topic, double rate=1.0, int number_runs=10000) |
| void | pubLoop (vector< PCRGB::Ptr > &pcs, const vector< std::string > &topics, double rate, int number_runs=10000) |
| void | readPCBag (const string &filename, PCRGB::Ptr &pc) |
| void | savePCBag (const string &filename, PCRGB::Ptr &pc) |
| void | transformPC (const PCRGB &in_pc, PCRGB &out_pc, const Eigen::Affine3d &transform) |
Typedef Documentation
| typedef pcl::PointCloud<PRGB> PCRGB |
Definition at line 28 of file pcl_basic.h.
| typedef pcl::PointXYZRGB PRGB |
Definition at line 27 of file pcl_basic.h.
Function Documentation
| void boxFilter | ( | const PCRGB & | in_pc, |
| PCRGB & | out_pc, | ||
| double | min_x, | ||
| double | max_x, | ||
| double | min_y, | ||
| double | max_y, | ||
| double | min_z, | ||
| double | max_z | ||
| ) |
Definition at line 79 of file pcl_basic.cpp.
| void extractIndices | ( | const PCRGB::Ptr & | in_pc, |
| pcl::IndicesPtr & | inds, | ||
| PCRGB::Ptr & | out_pc, | ||
| bool | is_negative = false |
||
| ) |
Definition at line 33 of file pcl_basic.cpp.
| void pubLoop | ( | PCRGB::Ptr & | pc, |
| const std::string & | topic, | ||
| double | rate = 1.0, |
||
| int | number_runs = 10000 |
||
| ) |
Definition at line 51 of file pcl_basic.cpp.
| void pubLoop | ( | vector< PCRGB::Ptr > & | pcs, |
| const vector< std::string > & | topics, | ||
| double | rate, | ||
| int | number_runs = 10000 |
||
| ) |
Definition at line 63 of file pcl_basic.cpp.
| void readPCBag | ( | const string & | filename, |
| PCRGB::Ptr & | pc | ||
| ) |
Definition at line 103 of file pcl_basic.cpp.
| void savePCBag | ( | const string & | filename, |
| PCRGB::Ptr & | pc | ||
| ) |
Definition at line 115 of file pcl_basic.cpp.
| void transformPC | ( | const PCRGB & | in_pc, |
| PCRGB & | out_pc, | ||
| const Eigen::Affine3d & | transform | ||
| ) |
Definition at line 4 of file pcl_basic.cpp.