#include <sstream>#include <boost/filesystem.hpp>#include <rosbag/bag.h>#include <rosbag/view.h>#include "pcl/io/io.h"#include "pcl/io/pcd_io.h"#include "pcl_ros/transforms.h"#include <tf/transform_listener.h>#include <tf/transform_broadcaster.h>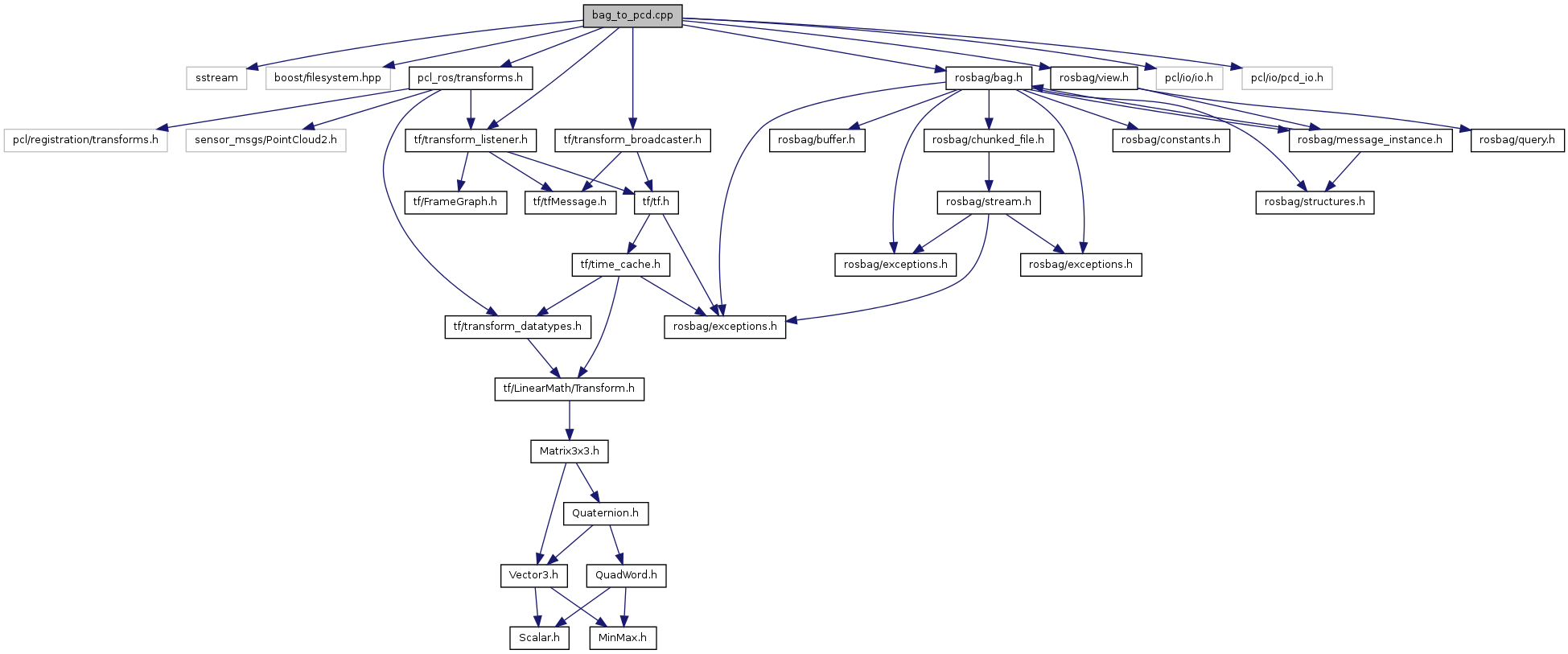
Go to the source code of this file.
Typedefs | |
| typedef sensor_msgs::PointCloud2 | PointCloud |
| typedef PointCloud::ConstPtr | PointCloudConstPtr |
| typedef PointCloud::Ptr | PointCloudPtr |
Functions | |
| int | main (int argc, char **argv) |
| typedef sensor_msgs::PointCloud2 PointCloud |
bag_to_pcd is a simple node that reads in a BAG file and saves all the PointCloud messages to disk in PCD (Point Cloud Data) format.
Definition at line 57 of file bag_to_pcd.cpp.
| typedef PointCloud::ConstPtr PointCloudConstPtr |
Definition at line 59 of file bag_to_pcd.cpp.
| typedef PointCloud::Ptr PointCloudPtr |
Definition at line 58 of file bag_to_pcd.cpp.
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 63 of file bag_to_pcd.cpp.

