#include <memory>#include <gtest/gtest.h>#include <uavcan/protocol/node_info_retriever.hpp>#include <uavcan/protocol/node_status_provider.hpp>#include "helpers.hpp"
Include dependency graph for node_info_retriever.cpp:
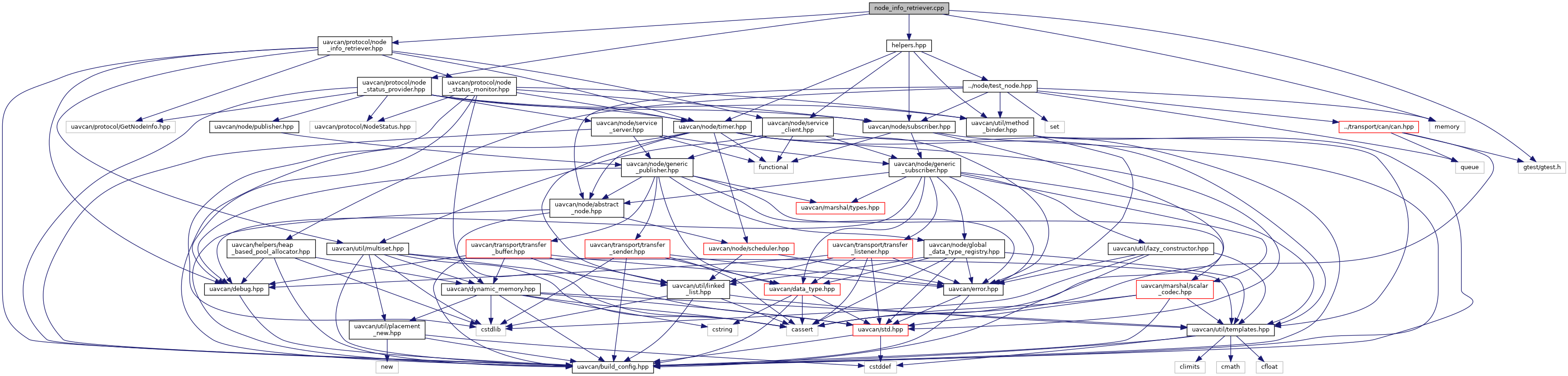
Go to the source code of this file.
Classes | |
| struct | NodeInfoListener |
Functions | |
| static void | publishNodeStatus (PairableCanDriver &can, uavcan::NodeID node_id, uavcan::uint32_t uptime_sec, uavcan::TransferID tid) |
| TEST (NodeInfoRetriever, Basic) | |
| TEST (NodeInfoRetriever, MaxConcurrentRequests) | |
Function Documentation
◆ publishNodeStatus()
|
static |
Definition at line 15 of file node_info_retriever.cpp.
◆ TEST() [1/2]
| TEST | ( | NodeInfoRetriever | , |
| Basic | |||
| ) |
Definition at line 70 of file node_info_retriever.cpp.
◆ TEST() [2/2]
| TEST | ( | NodeInfoRetriever | , |
| MaxConcurrentRequests | |||
| ) |
Definition at line 228 of file node_info_retriever.cpp.