#include <OdometryROS.h>
Classes | |
| class | OdomStatusTask |
Public Member Functions | |
| const std::string & | frameId () const |
| const std::string & | guessFrameId () const |
| bool | isPaused () const |
| OdometryROS (bool stereoParams, bool visParams, bool icpParams) | |
| const std::string & | odomFrameId () const |
| const rtabmap::ParametersMap & | parameters () const |
| bool | pause (std_srvs::Empty::Request &, std_srvs::Empty::Response &) |
| void | processData (rtabmap::SensorData &data, const std_msgs::Header &header) |
| bool | reset (std_srvs::Empty::Request &, std_srvs::Empty::Response &) |
| bool | resetToPose (rtabmap_msgs::ResetPose::Request &, rtabmap_msgs::ResetPose::Response &) |
| bool | resume (std_srvs::Empty::Request &, std_srvs::Empty::Response &) |
| bool | setLogDebug (std_srvs::Empty::Request &, std_srvs::Empty::Response &) |
| bool | setLogError (std_srvs::Empty::Request &, std_srvs::Empty::Response &) |
| bool | setLogInfo (std_srvs::Empty::Request &, std_srvs::Empty::Response &) |
| bool | setLogWarn (std_srvs::Empty::Request &, std_srvs::Empty::Response &) |
| virtual | ~OdometryROS () |
 Public Member Functions inherited from nodelet::Nodelet Public Member Functions inherited from nodelet::Nodelet | |
| void | init (const std::string &name, const M_string &remapping_args, const V_string &my_argv, ros::CallbackQueueInterface *st_queue=NULL, ros::CallbackQueueInterface *mt_queue=NULL) |
| Nodelet () | |
| virtual | ~Nodelet () |
| Public Member Functions inherited from UThread | |
| Handle | getThreadHandle () const |
| unsigned long | getThreadId () const |
| bool | isCreating () const |
| bool | isIdle () const |
| bool | isKilled () const |
| bool | isRunning () const |
| void | join (bool killFirst=false) |
| void | kill () |
| void | setAffinity (int cpu=0) |
| void | setPriority (Priority priority) |
| void | start () |
| UThread (Priority priority=kPNormal) | |
| virtual | ~UThread () |
| Public Member Functions inherited from UThreadC< void > | |
| int | Create (Handle *const &H=0, const bool &CreateDetached=false, const unsigned int &StackSize=0, const bool &CancelEnable=false, const bool &CancelAsync=false) const |
| int | Create (Handle *const &H=0, const bool &CreateDetached=false, const unsigned int &StackSize=0, const bool &CancelEnable=false, const bool &CancelAsync=false) const |
| int | Create (unsigned long &ThreadId, Handle *const &H=0, const bool &CreateDetached=false, const unsigned int &StackSize=0, const bool &CancelEnable=false, const bool &CancelAsync=false) const |
| int | Create (unsigned long &ThreadId, Handle *const &H=0, const bool &CreateDetached=false, const unsigned int &StackSize=0, const bool &CancelEnable=false, const bool &CancelAsync=false) const |
| virtual | ~UThreadC () |
| virtual | ~UThreadC () |
Private Member Functions | |
| void | callbackIMU (const sensor_msgs::ImuConstPtr &msg) |
| virtual void | mainLoop () |
| virtual void | mainLoopKill () |
| virtual void | onInit () |
| virtual void | onOdomInit ()=0 |
| void | reset (const rtabmap::Transform &pose=rtabmap::Transform::getIdentity()) |
| virtual void | updateParameters (rtabmap::ParametersMap ¶meters) |
Additional Inherited Members | |
| Public Types inherited from UThread | |
| enum | Priority |
| Public Types inherited from UThreadC< void > | |
| typedef THREAD_HANDLE | Handle |
| typedef THREAD_HANDLE | Handle |
| typedef void(* | Handler) () |
| typedef void(* | Handler) () |
| Static Public Member Functions inherited from UThread | |
| static unsigned long | currentThreadId () |
| Static Public Member Functions inherited from UThreadC< void > | |
| static int | Create (const Handler &Function, Handle *const &H=0, const bool &CreateDetached=false, const unsigned int &StackSize=0, const bool &CancelEnable=false, const bool &CancelAsync=false) |
| static int | Create (const Handler &Function, Handle *const &H=0, const bool &CreateDetached=false, const unsigned int &StackSize=0, const bool &CancelEnable=false, const bool &CancelAsync=false) |
| static int | Detach (const Handle &H) |
| static int | Detach (Handle H) |
| static int | Join (const Handle &H) |
| static int | Join (Handle H) |
| static int | Kill (const Handle &H) |
| static int | Kill (Handle H) |
| Public Attributes inherited from UThread | |
| kPAboveNormal | |
| kPBelowNormal | |
| kPLow | |
| kPNormal | |
| kPRealTime | |
| Static Protected Member Functions inherited from UThreadC< void > | |
| static void | Exit () |
| static void | Exit () |
| static int | Self () |
| static Handle | Self () |
| static void | TestCancel () |
| static void | TestCancel () |
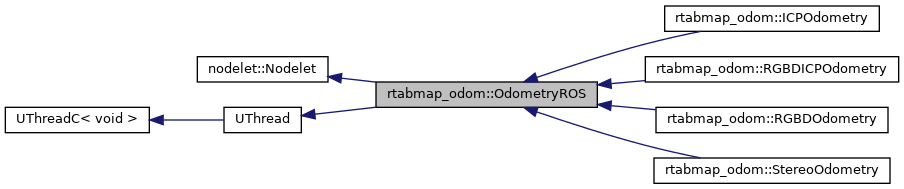
Detailed Description
Definition at line 59 of file OdometryROS.h.
Constructor & Destructor Documentation
◆ OdometryROS()
| rtabmap_odom::OdometryROS::OdometryROS | ( | bool | stereoParams, |
| bool | visParams, | ||
| bool | icpParams | ||
| ) |
Definition at line 60 of file OdometryROS.cpp.
◆ ~OdometryROS()
|
virtual |
Definition at line 94 of file OdometryROS.cpp.
Member Function Documentation
◆ callbackIMU()
|
private |
Definition at line 414 of file OdometryROS.cpp.
◆ flushCallbacks()
|
protectedpure virtual |
◆ frameId()
|
inline |
Definition at line 77 of file OdometryROS.h.
◆ guessFrameId()
|
inline |
Definition at line 79 of file OdometryROS.h.
◆ initDiagnosticMsg()
|
protected |
Definition at line 388 of file OdometryROS.cpp.
◆ isPaused()
|
inline |
Definition at line 81 of file OdometryROS.h.
◆ mainLoop()
|
privatevirtual |
Implements UThread.
Definition at line 488 of file OdometryROS.cpp.
◆ mainLoopKill()
|
privatevirtual |
Reimplemented from UThread.
Definition at line 482 of file OdometryROS.cpp.
◆ odomFrameId()
|
inline |
Definition at line 78 of file OdometryROS.h.
◆ onInit()
|
privatevirtual |
Implements nodelet::Nodelet.
Definition at line 100 of file OdometryROS.cpp.
◆ onOdomInit()
|
privatepure virtual |
◆ parameters()
|
inline |
Definition at line 80 of file OdometryROS.h.
◆ pause()
| bool rtabmap_odom::OdometryROS::pause | ( | std_srvs::Empty::Request & | , |
| std_srvs::Empty::Response & | |||
| ) |
Definition at line 1140 of file OdometryROS.cpp.
◆ postProcessData()
|
inlineprotectedvirtual |
Reimplemented in rtabmap_odom::ICPOdometry.
Definition at line 91 of file OdometryROS.h.
◆ previousStamp()
|
inlineprotected |
Definition at line 90 of file OdometryROS.h.
◆ processData()
| void rtabmap_odom::OdometryROS::processData | ( | rtabmap::SensorData & | data, |
| const std_msgs::Header & | header | ||
| ) |
Definition at line 461 of file OdometryROS.cpp.
◆ reset() [1/2]
|
private |
Definition at line 1122 of file OdometryROS.cpp.
◆ reset() [2/2]
| bool rtabmap_odom::OdometryROS::reset | ( | std_srvs::Empty::Request & | , |
| std_srvs::Empty::Response & | |||
| ) |
Definition at line 1107 of file OdometryROS.cpp.
◆ resetToPose()
| bool rtabmap_odom::OdometryROS::resetToPose | ( | rtabmap_msgs::ResetPose::Request & | req, |
| rtabmap_msgs::ResetPose::Response & | |||
| ) |
Definition at line 1114 of file OdometryROS.cpp.
◆ resume()
| bool rtabmap_odom::OdometryROS::resume | ( | std_srvs::Empty::Request & | , |
| std_srvs::Empty::Response & | |||
| ) |
Definition at line 1154 of file OdometryROS.cpp.
◆ setLogDebug()
| bool rtabmap_odom::OdometryROS::setLogDebug | ( | std_srvs::Empty::Request & | , |
| std_srvs::Empty::Response & | |||
| ) |
Definition at line 1168 of file OdometryROS.cpp.
◆ setLogError()
| bool rtabmap_odom::OdometryROS::setLogError | ( | std_srvs::Empty::Request & | , |
| std_srvs::Empty::Response & | |||
| ) |
Definition at line 1186 of file OdometryROS.cpp.
◆ setLogInfo()
| bool rtabmap_odom::OdometryROS::setLogInfo | ( | std_srvs::Empty::Request & | , |
| std_srvs::Empty::Response & | |||
| ) |
Definition at line 1174 of file OdometryROS.cpp.
◆ setLogWarn()
| bool rtabmap_odom::OdometryROS::setLogWarn | ( | std_srvs::Empty::Request & | , |
| std_srvs::Empty::Response & | |||
| ) |
Definition at line 1180 of file OdometryROS.cpp.
◆ tfListener()
|
inlineprotected |
Definition at line 87 of file OdometryROS.h.
◆ updateParameters()
|
inlineprivatevirtual |
Reimplemented in rtabmap_odom::RGBDOdometry, rtabmap_odom::StereoOdometry, rtabmap_odom::RGBDICPOdometry, and rtabmap_odom::ICPOdometry.
Definition at line 96 of file OdometryROS.h.
◆ velocityGuess()
|
protected |
Definition at line 405 of file OdometryROS.cpp.
◆ waitForTransformDuration()
|
inlineprotected |
Definition at line 88 of file OdometryROS.h.
Member Data Documentation
◆ bufferedDataToProcess_
|
private |
Definition at line 151 of file OdometryROS.h.
◆ compressionImgFormat_
|
private |
Definition at line 165 of file OdometryROS.h.
◆ compressionParallelized_
|
private |
Definition at line 166 of file OdometryROS.h.
◆ dataHeaderToProcess_
|
private |
Definition at line 150 of file OdometryROS.h.
◆ dataMutex_
|
private |
Definition at line 147 of file OdometryROS.h.
◆ dataReady_
|
private |
Definition at line 148 of file OdometryROS.h.
◆ dataToProcess_
|
private |
Definition at line 149 of file OdometryROS.h.
◆ expectedUpdateRate_
|
private |
Definition at line 162 of file OdometryROS.h.
◆ frameId_
|
private |
Definition at line 108 of file OdometryROS.h.
◆ groundTruthBaseFrameId_
|
private |
Definition at line 111 of file OdometryROS.h.
◆ groundTruthFrameId_
|
private |
Definition at line 110 of file OdometryROS.h.
◆ guess_
|
private |
Definition at line 159 of file OdometryROS.h.
◆ guessFrameId_
|
private |
Definition at line 112 of file OdometryROS.h.
◆ guessMinRotation_
|
private |
Definition at line 114 of file OdometryROS.h.
◆ guessMinTime_
|
private |
Definition at line 115 of file OdometryROS.h.
◆ guessMinTranslation_
|
private |
Definition at line 113 of file OdometryROS.h.
◆ guessPreviousPose_
|
private |
Definition at line 160 of file OdometryROS.h.
◆ icpParams_
|
private |
Definition at line 158 of file OdometryROS.h.
◆ imuMutex_
|
private |
Definition at line 146 of file OdometryROS.h.
◆ imuProcessed_
|
private |
Definition at line 169 of file OdometryROS.h.
◆ imus_
|
private |
Definition at line 170 of file OdometryROS.h.
◆ imuSub_
|
private |
Definition at line 143 of file OdometryROS.h.
◆ maxUpdateRate_
|
private |
Definition at line 163 of file OdometryROS.h.
◆ minUpdateRate_
|
private |
Definition at line 164 of file OdometryROS.h.
◆ odometry_
|
private |
Definition at line 105 of file OdometryROS.h.
◆ odomFrameId_
|
private |
Definition at line 109 of file OdometryROS.h.
◆ odomInfoLitePub_
|
private |
Definition at line 125 of file OdometryROS.h.
◆ odomInfoPub_
|
private |
Definition at line 124 of file OdometryROS.h.
◆ odomLastFrame_
|
private |
Definition at line 128 of file OdometryROS.h.
◆ odomLocalMap_
|
private |
Definition at line 126 of file OdometryROS.h.
◆ odomLocalScanMap_
|
private |
Definition at line 127 of file OdometryROS.h.
◆ odomPub_
|
private |
Definition at line 123 of file OdometryROS.h.
◆ odomRgbdImagePub_
|
private |
Definition at line 129 of file OdometryROS.h.
◆ odomSensorDataCompressedPub_
|
private |
Definition at line 132 of file OdometryROS.h.
◆ odomSensorDataFeaturesPub_
|
private |
Definition at line 131 of file OdometryROS.h.
◆ odomSensorDataPub_
|
private |
Definition at line 130 of file OdometryROS.h.
◆ odomStrategy_
|
private |
Definition at line 167 of file OdometryROS.h.
◆ parameters_
|
private |
Definition at line 121 of file OdometryROS.h.
◆ paused_
|
private |
Definition at line 153 of file OdometryROS.h.
◆ pauseSrv_
|
private |
Definition at line 135 of file OdometryROS.h.
◆ previousStamp_
|
private |
Definition at line 161 of file OdometryROS.h.
◆ publishCompressedSensorData_
|
private |
Definition at line 120 of file OdometryROS.h.
◆ publishNullWhenLost_
|
private |
Definition at line 119 of file OdometryROS.h.
◆ publishTf_
|
private |
Definition at line 116 of file OdometryROS.h.
◆ resetCountdown_
|
private |
Definition at line 154 of file OdometryROS.h.
◆ resetCurrentCount_
|
private |
Definition at line 155 of file OdometryROS.h.
◆ resetSrv_
|
private |
Definition at line 133 of file OdometryROS.h.
◆ resetToPoseSrv_
|
private |
Definition at line 134 of file OdometryROS.h.
◆ resumeSrv_
|
private |
Definition at line 136 of file OdometryROS.h.
◆ setLogDebugSrv_
|
private |
Definition at line 137 of file OdometryROS.h.
◆ setLogErrorSrv_
|
private |
Definition at line 140 of file OdometryROS.h.
◆ setLogInfoSrv_
|
private |
Definition at line 138 of file OdometryROS.h.
◆ setLogWarnSrv_
|
private |
Definition at line 139 of file OdometryROS.h.
◆ statusDiagnostic_
|
private |
Definition at line 184 of file OdometryROS.h.
◆ stereoParams_
|
private |
Definition at line 156 of file OdometryROS.h.
◆ syncDiagnostic_
|
private |
Definition at line 185 of file OdometryROS.h.
◆ tfBroadcaster_
|
private |
Definition at line 141 of file OdometryROS.h.
◆ tfListener_
|
private |
Definition at line 142 of file OdometryROS.h.
◆ ulogToRosout_
|
private |
Definition at line 172 of file OdometryROS.h.
◆ visParams_
|
private |
Definition at line 157 of file OdometryROS.h.
◆ waitForTransform_
|
private |
Definition at line 117 of file OdometryROS.h.
◆ waitForTransformDuration_
|
private |
Definition at line 118 of file OdometryROS.h.
◆ waitIMUToinit_
|
private |
Definition at line 168 of file OdometryROS.h.
The documentation for this class was generated from the following files: