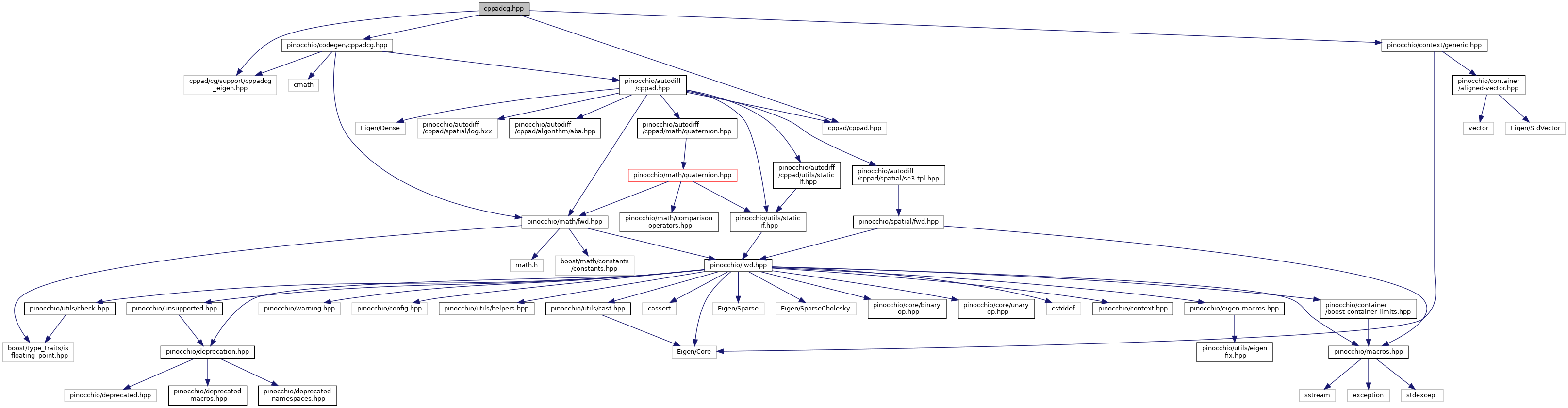
#include <cppad/cg/support/cppadcg_eigen.hpp>#include <cppad/cppad.hpp>#include "pinocchio/codegen/cppadcg.hpp"#include "pinocchio/context/generic.hpp"
Include dependency graph for context/cppadcg.hpp:
Go to the source code of this file.
Classes | |
| struct | pinocchio::internal::cast_call_normalize_method< Class, NewScalar, Scalar > |
| class | pinocchio::ForceBase< Derived > |
| Base interface for forces representation. More... | |
| class | pinocchio::ForceDense< Derived > |
| class | pinocchio::ForceTpl< _Scalar, _Options > |
| struct | pinocchio::internal::LHSScalarMultiplication< Type, Scalar > |
| More... | |
| class | pinocchio::MotionDense< Derived > |
| class | pinocchio::MotionRef< Vector6ArgType > |
| class | pinocchio::MotionTpl< _Scalar, _Options > |
| struct | pinocchio::MotionZeroTpl< Scalar, Options > |
| struct | pinocchio::internal::RHSScalarMultiplication< Type, Scalar > |
| More... | |
| struct | pinocchio::SE3Tpl< _Scalar, _Options > |
Namespaces | |
| pinocchio | |
| Main pinocchio namespace. | |
| pinocchio::internal | |
Macros | |
| #define | PINOCCHIO_SCALAR_TYPE ::CppAD::AD<CppAD::cg::CG<double>> |
| #define | PINOCCHIO_SKIP_ALGORITHM_GEOMETRY |
| #define | PINOCCHIO_SKIP_ALGORITHM_MODEL |
| #define | PINOCCHIO_SKIP_MULTIBODY_SAMPLE_MODELS |
Macro Definition Documentation
◆ PINOCCHIO_SCALAR_TYPE
| #define PINOCCHIO_SCALAR_TYPE ::CppAD::AD<CppAD::cg::CG<double>> |
Definition at line 51 of file context/cppadcg.hpp.
◆ PINOCCHIO_SKIP_ALGORITHM_GEOMETRY
| #define PINOCCHIO_SKIP_ALGORITHM_GEOMETRY |
Definition at line 12 of file context/cppadcg.hpp.
◆ PINOCCHIO_SKIP_ALGORITHM_MODEL
| #define PINOCCHIO_SKIP_ALGORITHM_MODEL |
Definition at line 11 of file context/cppadcg.hpp.
◆ PINOCCHIO_SKIP_MULTIBODY_SAMPLE_MODELS
| #define PINOCCHIO_SKIP_MULTIBODY_SAMPLE_MODELS |
Definition at line 13 of file context/cppadcg.hpp.