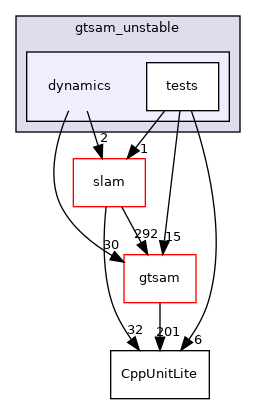
Directory dependency graph for dynamics:
Directories | |
| directory | tests |
Files | |
| file | DynamicsPriors.h [code] |
| Priors to be used with dynamic systems (Specifically PoseRTV) | |
| file | FullIMUFactor.h [code] |
| Factor to express an IMU measurement between dynamic poses. | |
| file | IMUFactor.h [code] |
| Factor to express an IMU measurement between dynamic poses. | |
| file | Pendulum.h [code] |
| Three-way factors for the pendulum dynamics as in [Stern06siggraph] for (1) explicit Euler method, (2) implicit Euler method, and (3) sympletic Euler method. Note that all methods use the same formulas for the factors. They are only different in the way we connect variables using those factors in the graph. | |
| file | PoseRTV.cpp [code] |
| file | PoseRTV.h [code] |
| Pose3 with translational velocity. | |
| file | SimpleHelicopter.cpp [code] |
| file | SimpleHelicopter.h [code] |
| file | VelocityConstraint.h [code] |
| Constraint enforcing the relationship between pose and velocity. | |
| file | VelocityConstraint3.h [code] |
| A simple 3-way factor constraining double poses and velocity. | |