Three-way factors for the pendulum dynamics as in [Stern06siggraph] for (1) explicit Euler method, (2) implicit Euler method, and (3) sympletic Euler method. Note that all methods use the same formulas for the factors. They are only different in the way we connect variables using those factors in the graph. More...
#include <gtsam/nonlinear/NonlinearFactor.h>
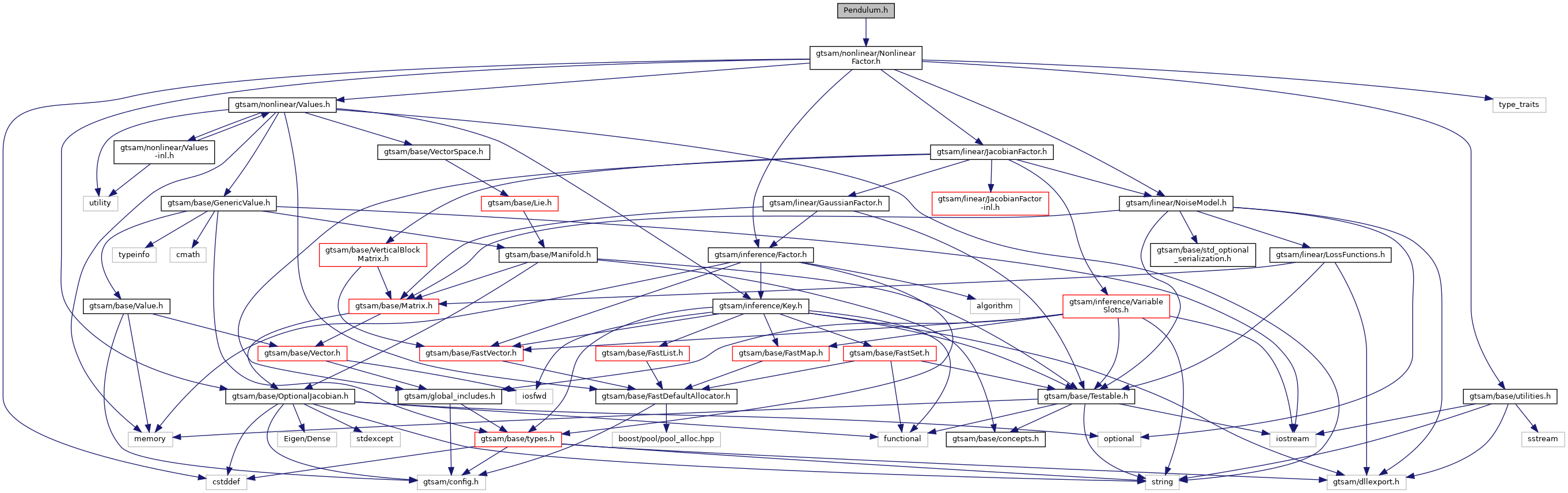
Include dependency graph for Pendulum.h:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | gtsam::PendulumFactor1 |
| class | gtsam::PendulumFactor2 |
| class | gtsam::PendulumFactorPk |
| class | gtsam::PendulumFactorPk1 |
Namespaces | |
| gtsam | |
| traits | |
Detailed Description
Three-way factors for the pendulum dynamics as in [Stern06siggraph] for (1) explicit Euler method, (2) implicit Euler method, and (3) sympletic Euler method. Note that all methods use the same formulas for the factors. They are only different in the way we connect variables using those factors in the graph.
Definition in file Pendulum.h.