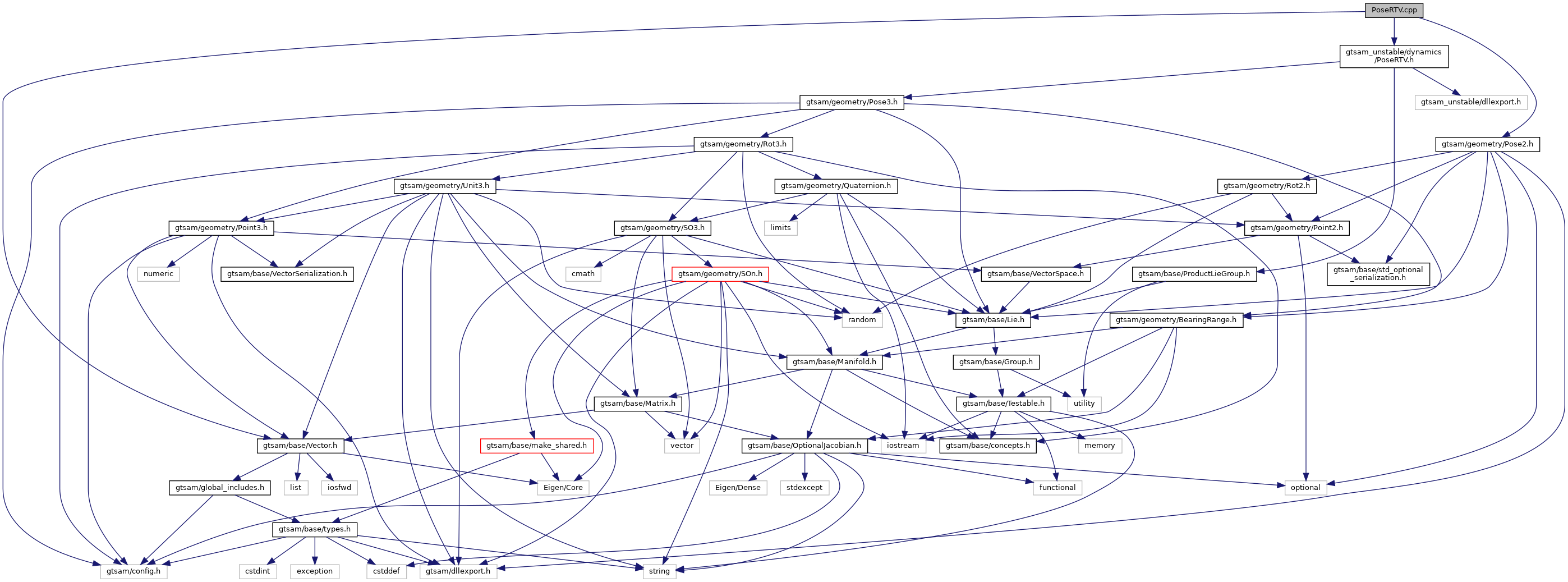
#include <gtsam_unstable/dynamics/PoseRTV.h>#include <gtsam/geometry/Pose2.h>#include <gtsam/base/Vector.h>#include <cassert>
Include dependency graph for PoseRTV.cpp:
Go to the source code of this file.
Namespaces | |
| gtsam | |
| traits | |
Functions | |
| double | gtsam::bound (double a, double min, double max) |
Variables | |
| static const Vector | gtsam::kGravity = Vector::Unit(3,2)*9.81 |
Detailed Description
Definition in file PoseRTV.cpp.