Priors to be used with dynamic systems (Specifically PoseRTV) More...
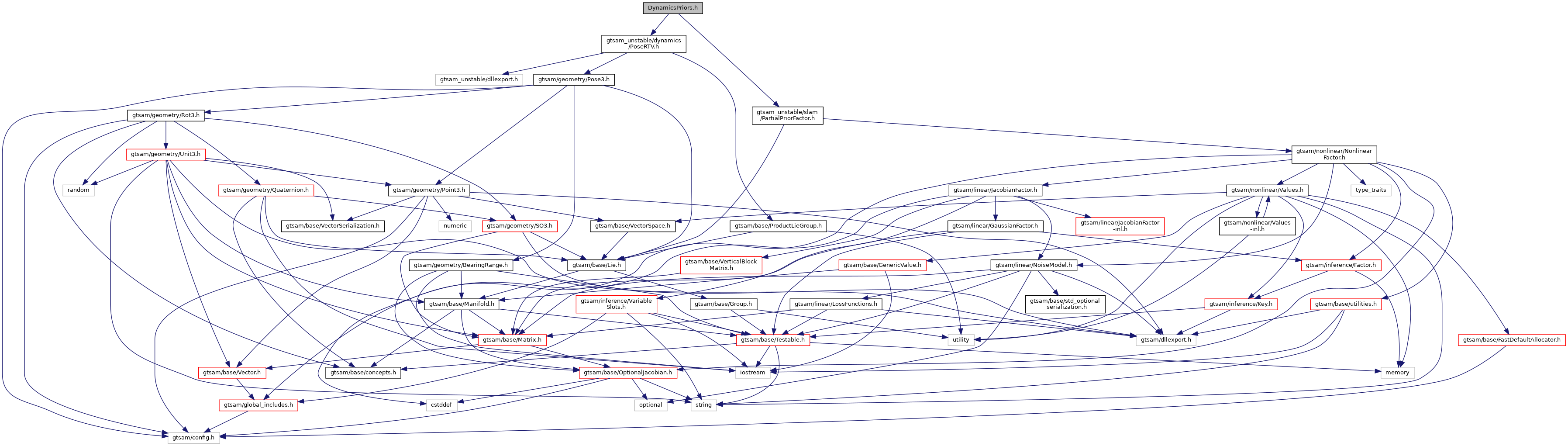
#include <gtsam_unstable/dynamics/PoseRTV.h>#include <gtsam_unstable/slam/PartialPriorFactor.h>#include <cassert>
Include dependency graph for DynamicsPriors.h:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | gtsam::DGroundConstraint |
| struct | gtsam::DHeightPrior |
| struct | gtsam::DRollPrior |
| struct | gtsam::VelocityPrior |
Namespaces | |
| gtsam | |
| traits | |
Variables | |
| static const size_t | gtsam::kHeightIndex = 5 |
| static const size_t | gtsam::kPitchIndex = 1 |
| static const size_t | gtsam::kRollIndex = 0 |
| static const std::vector< size_t > | gtsam::kVelocityIndices = { 6, 7, 8 } |
| static const size_t | gtsam::kVelocityZIndex = 8 |
Detailed Description
Priors to be used with dynamic systems (Specifically PoseRTV)
- Date
- Nov 22, 2011
Definition in file DynamicsPriors.h.