|
| | CameraThrottleNodelet () |
| |
| virtual | ~CameraThrottleNodelet () |
| |
| | ~Nodelet () override=default |
| |
| | ~NodeletBase () override=default |
| |
| void | init (const std::string &name, const M_string &remapping_args, const V_string &my_argv, ros::CallbackQueueInterface *st_queue=NULL, ros::CallbackQueueInterface *mt_queue=NULL) |
| |
| | Nodelet () |
| |
| | NodeletWithDiagnostics () |
| |
| virtual | ~NodeletWithDiagnostics () |
| |
| ::cras::NodeletAwareTFBuffer & | getBuffer () const override |
| |
| ::std::shared_ptr<::cras::NodeletAwareTFBuffer > | getBufferPtr () const |
| |
| | NodeletWithSharedTfBuffer () |
| |
| void | reset () override |
| |
| void | setBuffer (const ::std::shared_ptr<::tf2_ros::Buffer > &buffer) override |
| |
| bool | usesSharedBuffer () const override |
| |
| | ~NodeletWithSharedTfBuffer () override |
| |
| | ~ThreadNameUpdatingNodelet () override |
| |
| | NodeletParamHelper () |
| |
| | ~NodeletParamHelper () override |
| |
| ::cras::LogHelperPtr | getLogger () const |
| |
| inline ::std::string | getParam (const ::cras::GetParamAdapter ¶m, const ::std::string &name, const ::cras::optional< const char * > &defaultValue, const ::std::string &unit="", const ::cras::GetParamOptions<::std::string > &options={}) const |
| |
| ResultType | getParam (const ::cras::GetParamAdapter ¶m, const ::std::string &name, const ::cras::optional< ResultType > &defaultValue=ResultType(), const ::std::string &unit="", const ::cras::GetParamOptions< ResultType, ParamServerType > &options={}) const |
| |
| inline ::std::string | getParam (const ::cras::GetParamAdapter ¶m, const ::std::string &name, const char *defaultValue, const ::std::string &unit="", const ::cras::GetParamOptions<::std::string > &options={}) const |
| |
| ResultType | getParam (const ::cras::GetParamAdapter ¶m, const ::std::string &name, const ResultType &defaultValue=ResultType(), const ::std::string &unit="", const ::cras::GetParamOptions< ResultType, ParamServerType > &options={}) const |
| |
| inline ::cras::GetParamResult<::std::string > | getParamVerbose (const ::cras::GetParamAdapter ¶m, const ::std::string &name, const ::cras::optional< const char * > &defaultValue, const ::std::string &unit="", const ::cras::GetParamOptions<::std::string > &options={}) const |
| |
| inline ::cras::GetParamResult< ResultType > | getParamVerbose (const ::cras::GetParamAdapter ¶m, const ::std::string &name, const ::cras::optional< ResultType > &defaultValue=ResultType(), const ::std::string &unit="", const ::cras::GetParamOptions< ResultType, ParamServerType > &options={}) const |
| |
| inline ::cras::GetParamResult<::std::string > | getParamVerbose (const ::cras::GetParamAdapter ¶m, const ::std::string &name, const char *defaultValue, const ::std::string &unit="", const ::cras::GetParamOptions<::std::string > &options={}) const |
| |
| inline ::cras::GetParamResult< ResultType > | getParamVerbose (const ::cras::GetParamAdapter ¶m, const ::std::string &name, const ResultType &defaultValue=ResultType(), const ::std::string &unit="", const ::cras::GetParamOptions< ResultType, ParamServerType > &options={}) const |
| |
| | ParamHelper (const ::cras::LogHelperPtr &log) |
| |
| void | setLogger (const ::cras::LogHelperPtr &logger) |
| |
| virtual | ~ParamHelper ()=default |
| |
| ::cras::LogHelperConstPtr | getCrasLogger () const |
| |
| | HasLogger (const ::cras::LogHelperPtr &log) |
| |
| void | setCrasLogger (const ::cras::LogHelperPtr &log) |
| |
| bool | ok () const override |
| |
| void | requestStop () override |
| |
| void | shutdown () |
| |
| virtual | ~StatefulNodelet () |
| |
| | InterruptibleSleepInterface () |
| |
| virtual bool | sleep (const ::ros::Duration &duration) const |
| |
| virtual | ~InterruptibleSleepInterface () |
| |
|
| virtual void | cb (const sensor_msgs::ImageConstPtr &img, const sensor_msgs::CameraInfoConstPtr &info) |
| |
| virtual void | onFirstConnect () |
| |
| void | onInit () override |
| |
| virtual void | onLastDisconnect () |
| |
| ros::CallbackQueueInterface & | getMTCallbackQueue () const |
| |
| ros::NodeHandle & | getMTNodeHandle () const |
| |
| ros::NodeHandle & | getMTPrivateNodeHandle () const |
| |
| const V_string & | getMyArgv () const |
| |
| const std::string & | getName () const |
| |
| ros::NodeHandle & | getNodeHandle () const |
| |
| ros::NodeHandle & | getPrivateNodeHandle () const |
| |
| const M_string & | getRemappingArgs () const |
| |
| ros::CallbackQueueInterface & | getSTCallbackQueue () const |
| |
| std::string | getSuffixedName (const std::string &suffix) const |
| |
| ::std::unique_ptr<::cras::DiagnosedPublisher< Message > > | advertiseDiagnosed (::ros::NodeHandle publisherNh, ::ros::NodeHandle diagNh, const ::cras::SimpleTopicStatusParam< Message > &defaultDiagParams, const ::std::string &diagNamespace, ::ros::AdvertiseOptions &options) |
| |
| ::std::unique_ptr<::cras::DiagnosedPublisher< Message > > | advertiseDiagnosed (::ros::NodeHandle publisherNh, ::ros::NodeHandle diagNh, const ::cras::SimpleTopicStatusParam< Message > &defaultDiagParams, const ::std::string &diagNamespace, const ::std::string &topic, size_t queueSize, bool latch=false) |
| |
| ::std::unique_ptr<::cras::DiagnosedPublisher< Message > > | advertiseDiagnosed (::ros::NodeHandle publisherNh, ::ros::NodeHandle diagNh, const ::std::string &diagNamespace, ::ros::AdvertiseOptions &options) |
| |
| ::std::unique_ptr<::cras::DiagnosedPublisher< Message > > | advertiseDiagnosed (::ros::NodeHandle publisherNh, ::ros::NodeHandle diagNh, const ::std::string &diagNamespace, const ::std::string &topic, size_t queueSize, bool latch=false) |
| |
| ::std::unique_ptr<::cras::DiagnosedPublisher< Message > > | advertiseDiagnosed (::ros::NodeHandle publisherNh, ::ros::NodeHandle diagNh, const ::std::string &topic, size_t queueSize, bool latch=false) |
| |
| ::std::unique_ptr<::cras::DiagnosedPublisher< Message > > | advertiseDiagnosed (::ros::NodeHandle publisherNh, ::ros::NodeHandle diagNh, ros::AdvertiseOptions &options) |
| |
| ::std::unique_ptr<::cras::DiagnosedPublisher< Message > > | advertiseDiagnosed (::ros::NodeHandle publisherNh, const ::cras::SimpleTopicStatusParam< Message > &defaultDiagParams, const ::std::string &diagNamespace, ::ros::AdvertiseOptions &options) |
| |
| ::std::unique_ptr<::cras::DiagnosedPublisher< Message > > | advertiseDiagnosed (::ros::NodeHandle publisherNh, const ::cras::SimpleTopicStatusParam< Message > &defaultDiagParams, const ::std::string &diagNamespace, const ::std::string &topic, size_t queueSize, bool latch=false) |
| |
| ::std::unique_ptr<::cras::DiagnosedPublisher< Message > > | advertiseDiagnosed (::ros::NodeHandle publisherNh, const ::std::string &diagNamespace, ::ros::AdvertiseOptions &options) |
| |
| ::std::unique_ptr<::cras::DiagnosedPublisher< Message > > | advertiseDiagnosed (::ros::NodeHandle publisherNh, const ::std::string &diagNamespace, const ::std::string &topic, size_t queueSize, bool latch=false) |
| |
| ::std::unique_ptr<::cras::DiagnosedPublisher< Message > > | advertiseDiagnosed (::ros::NodeHandle publisherNh, const ::std::string &topic, size_t queueSize, bool latch=false) |
| |
| ::std::unique_ptr<::cras::DiagnosedPublisher< Message > > | advertiseDiagnosed (::ros::NodeHandle publisherNh, ros::AdvertiseOptions &options) |
| |
| ::std::unique_ptr<::cras::DiagnosedPublisher< Message > > | advertiseDiagnosed (const ::cras::SimpleTopicStatusParam< Message > &defaultDiagParams, const ::std::string &diagNamespace, ::ros::AdvertiseOptions &options) |
| |
| ::std::unique_ptr<::cras::DiagnosedPublisher< Message > > | advertiseDiagnosed (const ::cras::SimpleTopicStatusParam< Message > &defaultDiagParams, const ::std::string &diagNamespace, const ::std::string &topic, size_t queueSize, bool latch=false) |
| |
| ::std::unique_ptr<::cras::DiagnosedPublisher< Message > > | advertiseDiagnosed (const ::std::string &diagNamespace, ::ros::AdvertiseOptions &options) |
| |
| ::std::unique_ptr<::cras::DiagnosedPublisher< Message > > | advertiseDiagnosed (const ::std::string &diagNamespace, const ::std::string &topic, size_t queueSize, bool latch=false) |
| |
| ::std::unique_ptr<::cras::DiagnosedPublisher< Message > > | advertiseDiagnosed (const ::std::string &topic, size_t queueSize, bool latch=false) |
| |
| ::std::unique_ptr<::cras::DiagnosedPublisher< Message > > | advertiseDiagnosed (ros::AdvertiseOptions &options) |
| |
| | CRAS_NODELET_DIAG_GENERATE_OVERLOADS (CRAS_SINGLE_ARG(), CRAS_SINGLE_ARG(this->getNodeHandle(),), CRAS_SINGLE_ARG(), CRAS_SINGLE_ARG("",)) |
| |
| | CRAS_NODELET_DIAG_GENERATE_OVERLOADS (CRAS_SINGLE_ARG(), CRAS_SINGLE_ARG(this->getNodeHandle(),), CRAS_SINGLE_ARG(const ::cras::SimpleTopicStatusParam<::cras::BaseMessage< M >> &defaultDiagParams, const ::std::string &diagNamespace,), CRAS_SINGLE_ARG(defaultDiagParams, diagNamespace,)) |
| |
| | CRAS_NODELET_DIAG_GENERATE_OVERLOADS (CRAS_SINGLE_ARG(), CRAS_SINGLE_ARG(this->getNodeHandle(),), CRAS_SINGLE_ARG(const ::std::string &diagNamespace,), CRAS_SINGLE_ARG(::cras::SimpleTopicStatusParam<::cras::BaseMessage< M >>(), diagNamespace,)) |
| |
| | CRAS_NODELET_DIAG_GENERATE_OVERLOADS (CRAS_SINGLE_ARG(::ros::NodeHandle subscriberNh, ::ros::NodeHandle diagNh,), CRAS_SINGLE_ARG(subscriberNh, diagNh,), CRAS_SINGLE_ARG(), CRAS_SINGLE_ARG("",)) |
| |
| | CRAS_NODELET_DIAG_GENERATE_OVERLOADS (CRAS_SINGLE_ARG(::ros::NodeHandle subscriberNh, ::ros::NodeHandle diagNh,), CRAS_SINGLE_ARG(subscriberNh, diagNh,), CRAS_SINGLE_ARG(const ::std::string &diagNamespace,), CRAS_SINGLE_ARG(::cras::SimpleTopicStatusParam<::cras::BaseMessage< M >>(), diagNamespace,)) |
| |
| | CRAS_NODELET_DIAG_GENERATE_OVERLOADS (CRAS_SINGLE_ARG(::ros::NodeHandle subscriberNh,), CRAS_SINGLE_ARG(subscriberNh, this->getDefaultDiagNh(subscriberNh, ""),), CRAS_SINGLE_ARG(), CRAS_SINGLE_ARG("",)) |
| |
| | CRAS_NODELET_DIAG_GENERATE_OVERLOADS (CRAS_SINGLE_ARG(::ros::NodeHandle subscriberNh,), CRAS_SINGLE_ARG(subscriberNh, this->getDefaultDiagNh(subscriberNh, diagNamespace),), CRAS_SINGLE_ARG(const ::cras::SimpleTopicStatusParam<::cras::BaseMessage< M >> &defaultDiagParams, const ::std::string &diagNamespace,), CRAS_SINGLE_ARG(defaultDiagParams, diagNamespace,)) |
| |
| | CRAS_NODELET_DIAG_GENERATE_OVERLOADS (CRAS_SINGLE_ARG(::ros::NodeHandle subscriberNh,), CRAS_SINGLE_ARG(subscriberNh, this->getDefaultDiagNh(subscriberNh, diagNamespace),), CRAS_SINGLE_ARG(const ::std::string &diagNamespace,), CRAS_SINGLE_ARG(::cras::SimpleTopicStatusParam<::cras::BaseMessage< M >>(), diagNamespace,)) |
| |
| ::std::unique_ptr<::cras::DiagnosedPublisher< T > > | createDiagnosedPublisher (::ros::NodeHandle nh, const ::std::string &topic, size_t queueSize, const ::std::string ¶mNamespace) |
| |
| ::std::unique_ptr<::cras::DiagnosedPublisher< T > > | createDiagnosedPublisher (::ros::NodeHandle nh, const ::std::string &topic, size_t queueSize, const ::std::string ¶mNamespace, const ::ros::Rate &defaultRate) |
| |
| ::std::unique_ptr<::cras::DiagnosedPublisher< T > > | createDiagnosedPublisher (::ros::NodeHandle nh, const ::std::string &topic, size_t queueSize, const ::std::string ¶mNamespace, const ::ros::Rate &defaultRate, const ::ros::Rate &defaultMinRate, const ::ros::Rate &defaultMaxRate) |
| |
| ::ros::NodeHandle | getDefaultDiagNh (const ::ros::NodeHandle &pubSubNh, const ::std::string &diagNamespace) |
| |
| ::cras::BoundParamHelperPtr | getDiagParams (const ::ros::NodeHandle &nh, const ::std::string &diagNamespace, const ::std::string &topic) |
| |
| ::cras::DiagnosticUpdater & | getDiagUpdater (bool forceNew=false) const |
| |
| void | startDiagTimer () const |
| |
| void | startDiagTimer (const ::ros::NodeHandle &nh) const |
| |
| void | stopDiagTimer () const |
| |
| ::std::unique_ptr<::cras::DiagnosedSubscriber< Message > > | subscribeDiagnosed (::ros::NodeHandle subscriberNh, ::ros::NodeHandle diagNh, const ::cras::SimpleTopicStatusParam< Message > &defaultDiagParams, const ::std::string &diagNamespace, ::ros::SubscribeOptions &options) |
| |
| ::std::unique_ptr<::cras::DiagnosedSubscriber< Message > > | subscribeDiagnosed (::ros::NodeHandle subscriberNh, ::ros::NodeHandle diagNh, const ::cras::SimpleTopicStatusParam< Message > &defaultDiagParams, const ::std::string &diagNamespace, const ::std::string &topic, uint32_t queue_size, const ::boost::function< void(const ::boost::shared_ptr< Message > &)> &cb, ::ros::TransportHints hints={}) |
| |
| ::std::unique_ptr<::cras::DiagnosedSubscriber<::cras::BaseMessage< C > > > | subscribeDiagnosed (::ros::NodeHandle subscriberNh, ::ros::NodeHandle diagNh, const ::cras::SimpleTopicStatusParam<::cras::BaseMessage< C >> &defaultDiagParams, const ::std::string &diagNamespace, const ::std::string &topic, uint32_t queue_size, const ::boost::function< void(C)> &cb, ::ros::VoidConstPtr obj={}, ::ros::TransportHints hints={}) |
| |
| ::std::unique_ptr<::cras::DiagnosedSubscriber<::cras::BaseMessage< M > > > | subscribeDiagnosed (::ros::NodeHandle subscriberNh, ::ros::NodeHandle diagNh, const ::cras::SimpleTopicStatusParam<::cras::BaseMessage< M >> &defaultDiagParams, const ::std::string &diagNamespace, const ::std::string &topic, uint32_t queue_size, void(*cb)(M), ::ros::TransportHints hints={}) |
| |
| ::std::unique_ptr<::cras::DiagnosedSubscriber<::cras::BaseMessage< M > > > | subscribeDiagnosed (::ros::NodeHandle subscriberNh, ::ros::NodeHandle diagNh, const ::cras::SimpleTopicStatusParam<::cras::BaseMessage< M >> &defaultDiagParams, const ::std::string &diagNamespace, const ::std::string &topic, uint32_t queue_size, void(T::*cb)(M) const, const ::boost::shared_ptr< T > &obj, ::ros::TransportHints hints={}) |
| |
| ::std::unique_ptr<::cras::DiagnosedSubscriber<::cras::BaseMessage< M > > > | subscribeDiagnosed (::ros::NodeHandle subscriberNh, ::ros::NodeHandle diagNh, const ::cras::SimpleTopicStatusParam<::cras::BaseMessage< M >> &defaultDiagParams, const ::std::string &diagNamespace, const ::std::string &topic, uint32_t queue_size, void(T::*cb)(M) const, T *obj, ::ros::TransportHints hints={}) |
| |
| ::std::unique_ptr<::cras::DiagnosedSubscriber<::cras::BaseMessage< M > > > | subscribeDiagnosed (::ros::NodeHandle subscriberNh, ::ros::NodeHandle diagNh, const ::cras::SimpleTopicStatusParam<::cras::BaseMessage< M >> &defaultDiagParams, const ::std::string &diagNamespace, const ::std::string &topic, uint32_t queue_size, void(T::*cb)(M), const ::boost::shared_ptr< T > &obj, ::ros::TransportHints hints={}) |
| |
| ::std::unique_ptr<::cras::DiagnosedSubscriber<::cras::BaseMessage< M > > > | subscribeDiagnosed (::ros::NodeHandle subscriberNh, ::ros::NodeHandle diagNh, const ::cras::SimpleTopicStatusParam<::cras::BaseMessage< M >> &defaultDiagParams, const ::std::string &diagNamespace, const ::std::string &topic, uint32_t queue_size, void(T::*cb)(M), T *obj, ::ros::TransportHints hints={}) |
| |
| void | checkTimeJump () |
| |
| virtual void | checkTimeJump (const ::ros::Time &now) |
| |
| void | initRos (const ::ros::NodeHandle &pnh) override |
| |
| void | startAutoCheckTimeJump () |
| |
| virtual void | startAutoCheckTimeJump (const ::ros::WallRate &rate) |
| |
| virtual void | stopAutoCheckTimeJump () |
| |
| | TimeJumpResettable (const ::cras::LogHelperPtr &log) |
| |
| | ~TimeJumpResettable () override |
| |
| | Resettable (const ::cras::LogHelperPtr &log) |
| |
| virtual | ~Resettable () |
| |
| void | updateThreadName () const |
| |
| inline ::std::string | getParam (const ::ros::NodeHandle &node, const ::std::string &name, const ::cras::optional< const char * > &defaultValue, const ::std::string &unit="", const ::cras::GetParamOptions<::std::string > &options={}) |
| |
| ResultType | getParam (const ::ros::NodeHandle &node, const ::std::string &name, const ::cras::optional< ResultType > &defaultValue=ResultType(), const ::std::string &unit="", const ::cras::GetParamOptions< ResultType, ParamServerType > &options={}) |
| |
| inline ::std::string | getParam (const ::ros::NodeHandle &node, const ::std::string &name, const char *defaultValue, const ::std::string &unit="", const ::cras::GetParamOptions<::std::string > &options={}) |
| |
| ResultType | getParam (const ::ros::NodeHandle &node, const ::std::string &name, const ResultType &defaultValue=ResultType(), const ::std::string &unit="", const ::cras::GetParamOptions< ResultType, ParamServerType > &options={}) |
| |
| inline ::cras::GetParamResult<::std::string > | getParamVerbose (const ::ros::NodeHandle &node, const ::std::string &name, const ::cras::optional< const char * > &defaultValue, const ::std::string &unit="", const ::cras::GetParamOptions<::std::string > &options={}) |
| |
| inline ::cras::GetParamResult< ResultType > | getParamVerbose (const ::ros::NodeHandle &node, const ::std::string &name, const ::cras::optional< ResultType > &defaultValue=ResultType(), const ::std::string &unit="", const ::cras::GetParamOptions< ResultType, ParamServerType > &options={}) |
| |
| inline ::cras::GetParamResult<::std::string > | getParamVerbose (const ::ros::NodeHandle &node, const ::std::string &name, const char *defaultValue, const ::std::string &unit="", const ::cras::GetParamOptions<::std::string > &options={}) |
| |
| inline ::cras::GetParamResult< ResultType > | getParamVerbose (const ::ros::NodeHandle &node, const ::std::string &name, const ResultType &defaultValue=ResultType(), const ::std::string &unit="", const ::cras::GetParamOptions< ResultType, ParamServerType > &options={}) |
| |
| ::cras::BoundParamHelperPtr | params (const ::ros::NodeHandle &node, const ::std::string &ns="") const |
| |
| ::cras::BoundParamHelperPtr | paramsForNodeHandle (const ::ros::NodeHandle &node) const |
| |
| ::cras::BoundParamHelperPtr | privateParams (const ::std::string &ns="") const |
| |
| ::cras::BoundParamHelperPtr | publicParams (const ::std::string &ns="") const |
| |
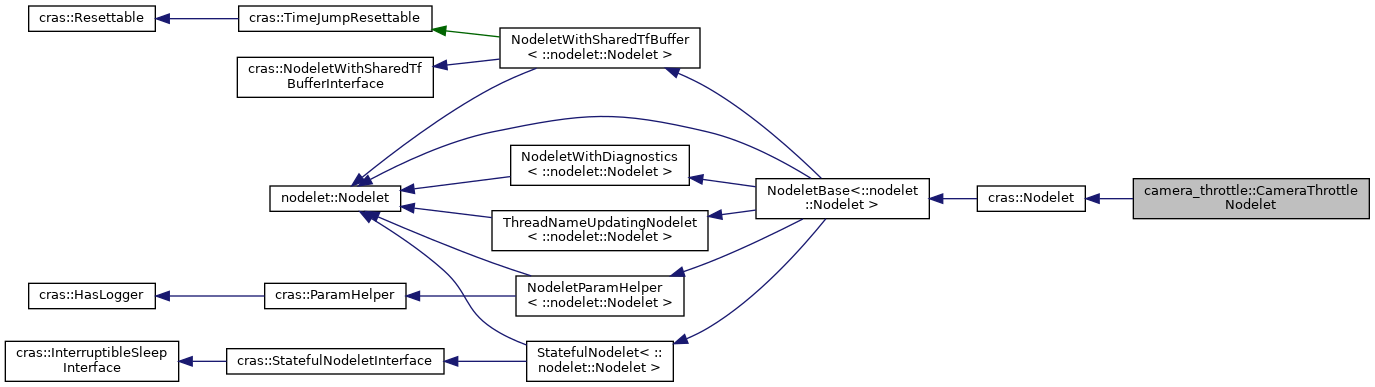
Throttle (or just relay) a camera topic pair (image_raw + camera_info) and publish the output via image_transport.
Parameters: ~rate: If set, the output topic will be rate-limited to this rate (probably a little lower). ~queue_size: Queue size for both subscription and publication. Default is 10. ~sub_base_name: Base name of the input image. Default is image_raw. ~pub_base_name: Base name of the output image. Default is whatever is set to ~sub_base_name. ~fix_frame_id: If set and nonempty, the images and camera infos will get this frame ID instead of the one they came with. ~flip_horizontal: If true, flip the image horizontally. Camera info remains unchanged. ~flip_vertical: If true, flip the image vertically. Camera info remains unchanged. ~image_transport: Specifies the image transport to use for subscribing the image.
Topics: camera_in: The input camera topics camera_in/camera_info camera_in/<~sub_base_name> camera_out: The output camera topics camera_out/camera_info camera_out/<~sub_base_name> camera_out/<~sub_base_name>/... - the classic set of topics created by image_transport publisher
Definition at line 36 of file camera_throttle.h.
 Public Member Functions inherited from cras::Nodelet
Public Member Functions inherited from cras::Nodelet