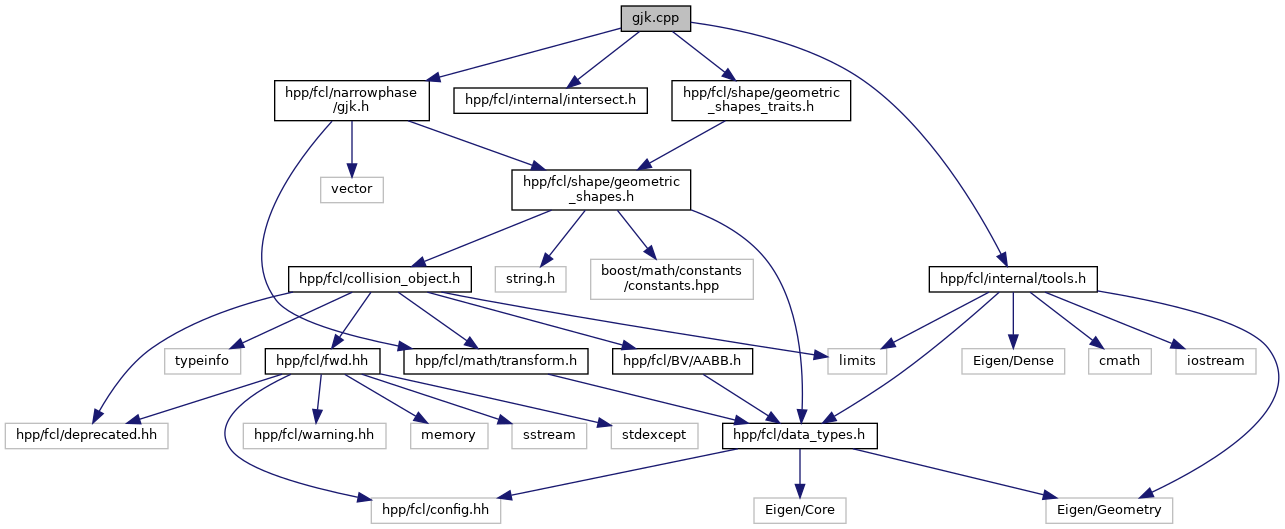
#include <hpp/fcl/narrowphase/gjk.h>#include <hpp/fcl/internal/intersect.h>#include <hpp/fcl/internal/tools.h>#include <hpp/fcl/shape/geometric_shapes_traits.h>
Include dependency graph for src/narrowphase/gjk.cpp:
Go to the source code of this file.
Classes | |
| struct | hpp::fcl::details::LargeConvex |
| struct | hpp::fcl::details::SmallConvex |
Namespaces | |
| hpp | |
| Main namespace. | |
| hpp::fcl | |
| hpp::fcl::details | |
| hpp::fcl::details::details | |
Macros | |
| #define | CALL_GET_SHAPE_SUPPORT(ShapeType) |
| #define | REGION_INSIDE() |
Functions | |
| bool | hpp::fcl::details::details::getClosestPoints (const GJK::Simplex &simplex, Vec3f &w0, Vec3f &w1) |
| bool | hpp::fcl::details::getNormalizeSupportDirection (const ShapeBase *shape) |
| void | hpp::fcl::details::getNormalizeSupportDirectionFromShapes (const ShapeBase *shape0, const ShapeBase *shape1, bool &normalize_support_direction) |
| void | hpp::fcl::details::getShapeSupport (const TriangleP *triangle, const Vec3f &dir, Vec3f &support, int &, MinkowskiDiff::ShapeData *) |
| void | hpp::fcl::details::getShapeSupport (const Box *box, const Vec3f &dir, Vec3f &support, int &, MinkowskiDiff::ShapeData *) |
| void | hpp::fcl::details::getShapeSupport (const Sphere *, const Vec3f &, Vec3f &support, int &, MinkowskiDiff::ShapeData *) |
| void | hpp::fcl::details::getShapeSupport (const Ellipsoid *ellipsoid, const Vec3f &dir, Vec3f &support, int &, MinkowskiDiff::ShapeData *) |
| void | hpp::fcl::details::getShapeSupport (const Capsule *capsule, const Vec3f &dir, Vec3f &support, int &, MinkowskiDiff::ShapeData *) |
| void | hpp::fcl::details::getShapeSupport (const Cone *cone, const Vec3f &dir, Vec3f &support, int &, MinkowskiDiff::ShapeData *) |
| void | hpp::fcl::details::getShapeSupport (const Cylinder *cylinder, const Vec3f &dir, Vec3f &support, int &, MinkowskiDiff::ShapeData *) |
| void | hpp::fcl::details::getShapeSupport (const ConvexBase *convex, const Vec3f &dir, Vec3f &support, int &hint, MinkowskiDiff::ShapeData *) |
| void | hpp::fcl::details::getShapeSupport (const SmallConvex *convex, const Vec3f &dir, Vec3f &support, int &hint, MinkowskiDiff::ShapeData *data) |
| void | hpp::fcl::details::getShapeSupport (const LargeConvex *convex, const Vec3f &dir, Vec3f &support, int &hint, MinkowskiDiff::ShapeData *data) |
| void | hpp::fcl::details::getShapeSupportLinear (const ConvexBase *convex, const Vec3f &dir, Vec3f &support, int &hint, MinkowskiDiff::ShapeData *) |
| void | hpp::fcl::details::getShapeSupportLog (const ConvexBase *convex, const Vec3f &dir, Vec3f &support, int &hint, MinkowskiDiff::ShapeData *data) |
| Vec3f | hpp::fcl::details::getSupport (const ShapeBase *shape, const Vec3f &dir, bool dirIsNormalized, int &hint) |
| the support function for shape More... | |
| template<typename Shape0 , typename Shape1 , bool TransformIsIdentity> | |
| void | hpp::fcl::details::getSupportFuncTpl (const MinkowskiDiff &md, const Vec3f &dir, bool dirIsNormalized, Vec3f &support0, Vec3f &support1, support_func_guess_t &hint, MinkowskiDiff::ShapeData data[2]) |
| template<typename Shape0 , typename Shape1 , bool TransformIsIdentity> | |
| void | hpp::fcl::details::getSupportTpl (const Shape0 *s0, const Shape1 *s1, const Matrix3f &oR1, const Vec3f &ot1, const Vec3f &dir, Vec3f &support0, Vec3f &support1, support_func_guess_t &hint, MinkowskiDiff::ShapeData data[2]) |
| template<bool Separated> | |
| void | hpp::fcl::details::details::inflate (const MinkowskiDiff &shape, Vec3f &w0, Vec3f &w1) |
| Inflate the points. More... | |
| MinkowskiDiff::GetSupportFunction | hpp::fcl::details::makeGetSupportFunction0 (const ShapeBase *s0, const ShapeBase *s1, bool identity, Eigen::Array< FCL_REAL, 1, 2 > &inflation, int linear_log_convex_threshold) |
| template<typename Shape0 > | |
| MinkowskiDiff::GetSupportFunction | hpp::fcl::details::makeGetSupportFunction1 (const ShapeBase *s1, bool identity, Eigen::Array< FCL_REAL, 1, 2 > &inflation, int linear_log_convex_threshold) |
| void | hpp::fcl::details::originToPoint (const GJK::Simplex ¤t, GJK::vertex_id_t a, const Vec3f &A, GJK::Simplex &next, Vec3f &ray) |
| void | hpp::fcl::details::originToSegment (const GJK::Simplex ¤t, GJK::vertex_id_t a, GJK::vertex_id_t b, const Vec3f &A, const Vec3f &B, const Vec3f &AB, const FCL_REAL &ABdotAO, GJK::Simplex &next, Vec3f &ray) |
| bool | hpp::fcl::details::originToTriangle (const GJK::Simplex ¤t, GJK::vertex_id_t a, GJK::vertex_id_t b, GJK::vertex_id_t c, const Vec3f &ABC, const FCL_REAL &ABCdotAO, GJK::Simplex &next, Vec3f &ray) |
Macro Definition Documentation
◆ CALL_GET_SHAPE_SUPPORT
| #define CALL_GET_SHAPE_SUPPORT | ( | ShapeType | ) |
Value:
static_cast<const ShapeType*>(shape), \
(shape_traits<ShapeType>::NeedNormalizedDir && !dirIsNormalized) \
? dir.normalized() \
: dir, \
support, hint, NULL)
void getShapeSupport(const LargeConvex *convex, const Vec3f &dir, Vec3f &support, int &hint, MinkowskiDiff::ShapeData *data)
Definition: src/narrowphase/gjk.cpp:245
Definition at line 252 of file src/narrowphase/gjk.cpp.