Unit tests for Rot3 class - common between Matrix and Quaternion. More...
#include <gtsam/geometry/Point3.h>#include <gtsam/geometry/Rot3.h>#include <gtsam/base/testLie.h>#include <gtsam/base/Testable.h>#include <gtsam/base/numericalDerivative.h>#include <gtsam/base/lieProxies.h>#include <CppUnitLite/TestHarness.h>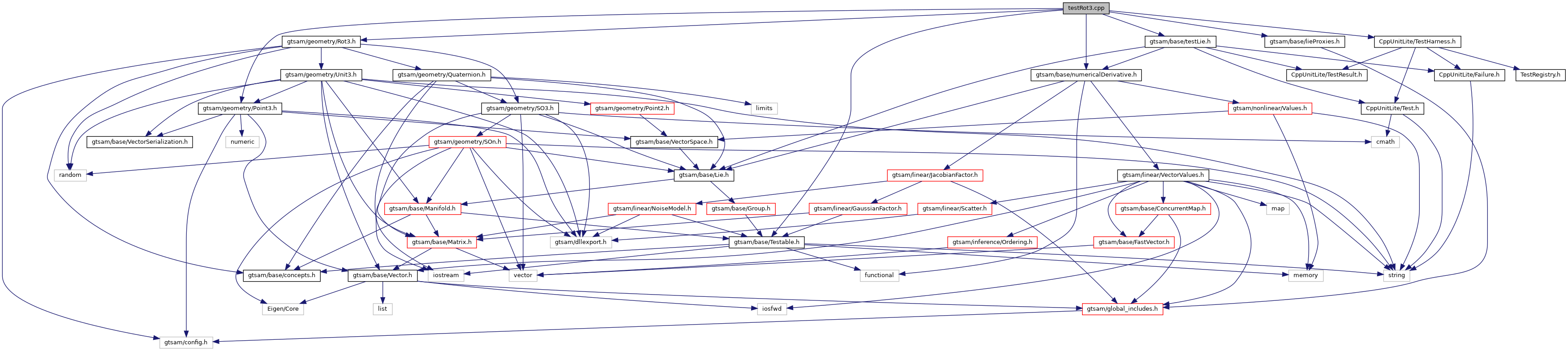
Go to the source code of this file.
Classes | |
| class | AngularVelocity |
Macros | |
| #define | CHECK_AXIS_ANGLE(expectedAxis, expectedAngle, rotation) |
| #define | CHECK_OMEGA(X, Y, Z) |
| #define | CHECK_OMEGA_ZERO(X, Y, Z) |
Functions | |
| AngularVelocity | bracket (const AngularVelocity &X, const AngularVelocity &Y) |
| Matrix | Cayley (const Matrix &A) |
| int | main () |
| static Point3 | P (0.2, 0.7, -2.0) |
| double | pitch_proxy (Rot3 const &R) |
| double | roll_proxy (Rot3 const &R) |
| Vector3 | rpy_proxy (Rot3 const &R) |
| Vector3 | RQ_proxy (Matrix3 const &R) |
| Rot3 | RzRyRx_proxy (double const &a, double const &b, double const &c) |
| Rot3 | RzRyRx_proxy (Vector3 const &xyz) |
| Rot3 | slow_but_correct_Rodrigues (const Vector &w) |
| TEST (Rot3, Concept) | |
| TEST (Rot3, chart) | |
| TEST (Rot3, constructor) | |
| TEST (Rot3, constructor2) | |
| TEST (Rot3, constructor3) | |
| TEST (Rot3, transpose) | |
| TEST (Rot3, equals) | |
| TEST (Rot3, AxisAngle) | |
| TEST (Rot3, AxisAngle2) | |
| TEST (Rot3, Rodrigues) | |
| TEST (Rot3, Rodrigues2) | |
| TEST (Rot3, Rodrigues3) | |
| TEST (Rot3, Rodrigues4) | |
| TEST (Rot3, retract) | |
| TEST (Rot3, log) | |
| TEST (Rot3, retract_localCoordinates) | |
| TEST (Rot3, expmap_logmap) | |
| TEST (Rot3, retract_localCoordinates2) | |
| TEST (Rot3, manifold_expmap) | |
| TEST (Rot3, BCH) | |
| TEST (Rot3, rotate_derivatives) | |
| TEST (Rot3, unrotate) | |
| TEST (Rot3, compose) | |
| TEST (Rot3, inverse) | |
| TEST (Rot3, between) | |
| TEST (Rot3, xyz) | |
| TEST (Rot3, yaw_pitch_roll) | |
| TEST (Rot3, RQ) | |
| TEST (Rot3, expmapStability) | |
| TEST (Rot3, logmapStability) | |
| TEST (Rot3, quaternion) | |
| TEST (Rot3, Cayley) | |
| TEST (Rot3, stream) | |
| TEST (Rot3, slerp) | |
| TEST (Rot3, Invariants) | |
| TEST (Rot3, LieGroupDerivatives) | |
| TEST (Rot3, ChartDerivatives) | |
| TEST (Rot3, ClosestTo) | |
| TEST (Rot3, axisAngle) | |
| TEST (Rot3, RzRyRx_scalars_derivative) | |
| TEST (Rot3, RzRyRx_vector_derivative) | |
| TEST (Rot3, Ypr_derivative) | |
| TEST (Rot3, RQ_derivative) | |
| TEST (Rot3, xyz_derivative) | |
| TEST (Rot3, ypr_derivative) | |
| TEST (Rot3, rpy_derivative) | |
| TEST (Rot3, roll_derivative) | |
| TEST (Rot3, pitch_derivative) | |
| TEST (Rot3, yaw_derivative) | |
| TEST (Rot3, determinant) | |
| Vector3 | xyz_proxy (Rot3 const &R) |
| double | yaw_proxy (Rot3 const &R) |
| Rot3 | Ypr_proxy (double const &y, double const &p, double const &r) |
| Vector3 | ypr_proxy (Rot3 const &R) |
Variables | |
| static double | epsilon = 0.001 |
| static double | error = 1e-9 |
| static Rot3 | R = Rot3::Rodrigues(0.1, 0.4, 0.2) |
Detailed Description
Unit tests for Rot3 class - common between Matrix and Quaternion.
Unit tests for Rot3Q class.
Unit tests for Rot3 class, Quaternion specific.
Definition in file testRot3.cpp.
Macro Definition Documentation
◆ CHECK_AXIS_ANGLE
| #define CHECK_AXIS_ANGLE | ( | expectedAxis, | |
| expectedAngle, | |||
| rotation | |||
| ) |
◆ CHECK_OMEGA
◆ CHECK_OMEGA_ZERO
Function Documentation
◆ bracket()
| AngularVelocity bracket | ( | const AngularVelocity & | X, |
| const AngularVelocity & | Y | ||
| ) |
Definition at line 337 of file testRot3.cpp.
◆ Cayley()
Definition at line 601 of file testRot3.cpp.
◆ main()
| int main | ( | void | ) |
Definition at line 941 of file testRot3.cpp.
◆ P()
|
static |
◆ pitch_proxy()
| double pitch_proxy | ( | Rot3 const & | R | ) |
Definition at line 895 of file testRot3.cpp.
◆ roll_proxy()
| double roll_proxy | ( | Rot3 const & | R | ) |
Definition at line 882 of file testRot3.cpp.
◆ rpy_proxy()
Definition at line 869 of file testRot3.cpp.
◆ RQ_proxy()
| Vector3 RQ_proxy | ( | Matrix3 const & | R | ) |
Definition at line 805 of file testRot3.cpp.
◆ RzRyRx_proxy() [1/2]
| Rot3 RzRyRx_proxy | ( | double const & | a, |
| double const & | b, | ||
| double const & | c | ||
| ) |
Definition at line 754 of file testRot3.cpp.
◆ RzRyRx_proxy() [2/2]
Definition at line 773 of file testRot3.cpp.
◆ slow_but_correct_Rodrigues()
Definition at line 97 of file testRot3.cpp.
◆ TEST() [1/50]
| TEST | ( | Rot3 | , |
| Concept | |||
| ) |
Definition at line 40 of file testRot3.cpp.
◆ TEST() [2/50]
| TEST | ( | Rot3 | , |
| chart | |||
| ) |
Definition at line 47 of file testRot3.cpp.
◆ TEST() [3/50]
| TEST | ( | Rot3 | , |
| constructor | |||
| ) |
Definition at line 54 of file testRot3.cpp.
◆ TEST() [4/50]
| TEST | ( | Rot3 | , |
| constructor2 | |||
| ) |
Definition at line 63 of file testRot3.cpp.
◆ TEST() [5/50]
| TEST | ( | Rot3 | , |
| constructor3 | |||
| ) |
Definition at line 72 of file testRot3.cpp.
◆ TEST() [6/50]
| TEST | ( | Rot3 | , |
| transpose | |||
| ) |
Definition at line 80 of file testRot3.cpp.
◆ TEST() [7/50]
Definition at line 88 of file testRot3.cpp.
◆ TEST() [8/50]
| TEST | ( | Rot3 | , |
| AxisAngle | |||
| ) |
Definition at line 106 of file testRot3.cpp.
◆ TEST() [9/50]
| TEST | ( | Rot3 | , |
| AxisAngle2 | |||
| ) |
Definition at line 124 of file testRot3.cpp.
◆ TEST() [10/50]
| TEST | ( | Rot3 | , |
| Rodrigues | |||
| ) |
Definition at line 137 of file testRot3.cpp.
◆ TEST() [11/50]
| TEST | ( | Rot3 | , |
| Rodrigues2 | |||
| ) |
Definition at line 146 of file testRot3.cpp.
◆ TEST() [12/50]
| TEST | ( | Rot3 | , |
| Rodrigues3 | |||
| ) |
Definition at line 160 of file testRot3.cpp.
◆ TEST() [13/50]
| TEST | ( | Rot3 | , |
| Rodrigues4 | |||
| ) |
Definition at line 169 of file testRot3.cpp.
◆ TEST() [14/50]
| TEST | ( | Rot3 | , |
| retract | |||
| ) |
Definition at line 183 of file testRot3.cpp.
◆ TEST() [15/50]
Definition at line 195 of file testRot3.cpp.
◆ TEST() [16/50]
| TEST | ( | Rot3 | , |
| retract_localCoordinates | |||
| ) |
Definition at line 273 of file testRot3.cpp.
◆ TEST() [17/50]
| TEST | ( | Rot3 | , |
| expmap_logmap | |||
| ) |
Definition at line 280 of file testRot3.cpp.
◆ TEST() [18/50]
| TEST | ( | Rot3 | , |
| retract_localCoordinates2 | |||
| ) |
Definition at line 288 of file testRot3.cpp.
◆ TEST() [19/50]
| TEST | ( | Rot3 | , |
| manifold_expmap | |||
| ) |
Definition at line 298 of file testRot3.cpp.
◆ TEST() [20/50]
| TEST | ( | Rot3 | , |
| BCH | |||
| ) |
Definition at line 342 of file testRot3.cpp.
◆ TEST() [21/50]
| TEST | ( | Rot3 | , |
| rotate_derivatives | |||
| ) |
Definition at line 355 of file testRot3.cpp.
◆ TEST() [22/50]
| TEST | ( | Rot3 | , |
| unrotate | |||
| ) |
Definition at line 369 of file testRot3.cpp.
◆ TEST() [23/50]
| TEST | ( | Rot3 | , |
| compose | |||
| ) |
Definition at line 384 of file testRot3.cpp.
◆ TEST() [24/50]
Definition at line 404 of file testRot3.cpp.
◆ TEST() [25/50]
| TEST | ( | Rot3 | , |
| between | |||
| ) |
Definition at line 420 of file testRot3.cpp.
◆ TEST() [26/50]
| TEST | ( | Rot3 | , |
| xyz | |||
| ) |
Definition at line 452 of file testRot3.cpp.
◆ TEST() [27/50]
| TEST | ( | Rot3 | , |
| yaw_pitch_roll | |||
| ) |
Definition at line 483 of file testRot3.cpp.
◆ TEST() [28/50]
| TEST | ( | Rot3 | , |
| RQ | |||
| ) |
Definition at line 504 of file testRot3.cpp.
◆ TEST() [29/50]
| TEST | ( | Rot3 | , |
| expmapStability | |||
| ) |
Definition at line 534 of file testRot3.cpp.
◆ TEST() [30/50]
| TEST | ( | Rot3 | , |
| logmapStability | |||
| ) |
Definition at line 550 of file testRot3.cpp.
◆ TEST() [31/50]
| TEST | ( | Rot3 | , |
| quaternion | |||
| ) |
Definition at line 563 of file testRot3.cpp.
◆ TEST() [32/50]
Definition at line 607 of file testRot3.cpp.
◆ TEST() [33/50]
| TEST | ( | Rot3 | , |
| stream | |||
| ) |
Definition at line 615 of file testRot3.cpp.
◆ TEST() [34/50]
| TEST | ( | Rot3 | , |
| slerp | |||
| ) |
Definition at line 625 of file testRot3.cpp.
◆ TEST() [35/50]
| TEST | ( | Rot3 | , |
| Invariants | |||
| ) |
Definition at line 644 of file testRot3.cpp.
◆ TEST() [36/50]
| TEST | ( | Rot3 | , |
| LieGroupDerivatives | |||
| ) |
Definition at line 659 of file testRot3.cpp.
◆ TEST() [37/50]
| TEST | ( | Rot3 | , |
| ChartDerivatives | |||
| ) |
Definition at line 668 of file testRot3.cpp.
◆ TEST() [38/50]
| TEST | ( | Rot3 | , |
| ClosestTo | |||
| ) |
Definition at line 679 of file testRot3.cpp.
◆ TEST() [39/50]
| TEST | ( | Rot3 | , |
| axisAngle | |||
| ) |
◆ TEST() [40/50]
| TEST | ( | Rot3 | , |
| RzRyRx_scalars_derivative | |||
| ) |
Definition at line 758 of file testRot3.cpp.
◆ TEST() [41/50]
| TEST | ( | Rot3 | , |
| RzRyRx_vector_derivative | |||
| ) |
Definition at line 775 of file testRot3.cpp.
◆ TEST() [42/50]
| TEST | ( | Rot3 | , |
| Ypr_derivative | |||
| ) |
Definition at line 790 of file testRot3.cpp.
◆ TEST() [43/50]
| TEST | ( | Rot3 | , |
| RQ_derivative | |||
| ) |
Definition at line 810 of file testRot3.cpp.
◆ TEST() [44/50]
| TEST | ( | Rot3 | , |
| xyz_derivative | |||
| ) |
Definition at line 845 of file testRot3.cpp.
◆ TEST() [45/50]
| TEST | ( | Rot3 | , |
| ypr_derivative | |||
| ) |
Definition at line 858 of file testRot3.cpp.
◆ TEST() [46/50]
| TEST | ( | Rot3 | , |
| rpy_derivative | |||
| ) |
Definition at line 871 of file testRot3.cpp.
◆ TEST() [47/50]
| TEST | ( | Rot3 | , |
| roll_derivative | |||
| ) |
Definition at line 884 of file testRot3.cpp.
◆ TEST() [48/50]
| TEST | ( | Rot3 | , |
| pitch_derivative | |||
| ) |
Definition at line 897 of file testRot3.cpp.
◆ TEST() [49/50]
| TEST | ( | Rot3 | , |
| yaw_derivative | |||
| ) |
Definition at line 910 of file testRot3.cpp.
◆ TEST() [50/50]
| TEST | ( | Rot3 | , |
| determinant | |||
| ) |
Definition at line 921 of file testRot3.cpp.
◆ xyz_proxy()
Definition at line 843 of file testRot3.cpp.
◆ yaw_proxy()
| double yaw_proxy | ( | Rot3 const & | R | ) |
Definition at line 908 of file testRot3.cpp.
◆ Ypr_proxy()
| Rot3 Ypr_proxy | ( | double const & | y, |
| double const & | p, | ||
| double const & | r | ||
| ) |
Definition at line 786 of file testRot3.cpp.
◆ ypr_proxy()
Definition at line 856 of file testRot3.cpp.
Variable Documentation
◆ epsilon
|
static |
Definition at line 37 of file testRot3.cpp.
◆ error
|
static |
Definition at line 37 of file testRot3.cpp.
◆ R
|
static |
Definition at line 35 of file testRot3.cpp.