Defines the hardware abstraction methods for communicating with dynamixels. More...
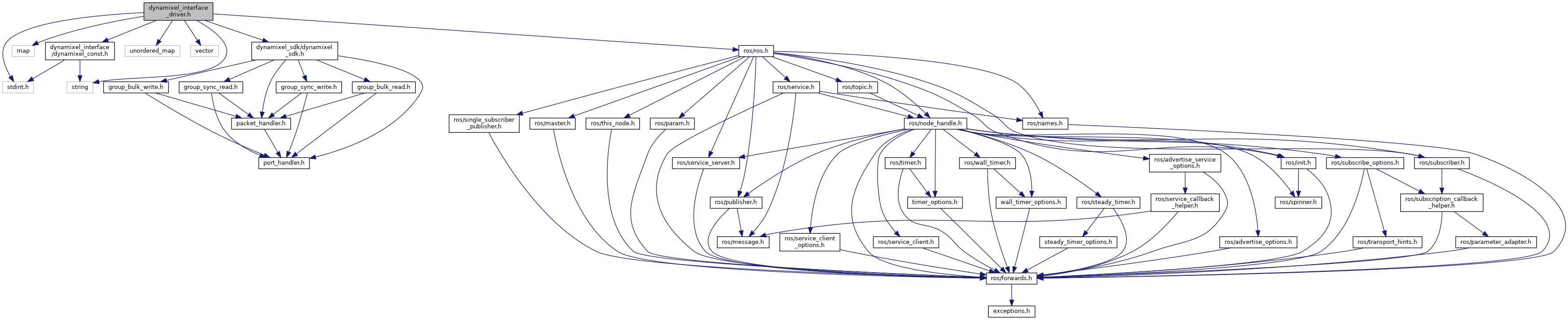
#include <stdint.h>#include <map>#include <string>#include <unordered_map>#include <vector>#include <dynamixel_interface/dynamixel_const.h>#include <dynamixel_sdk/dynamixel_sdk.h>#include <ros/ros.h>
Include dependency graph for dynamixel_interface_driver.h:
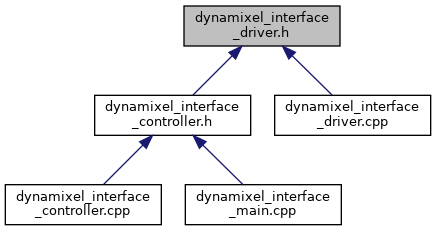
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | dynamixel_interface::DynamixelDataport |
| data struct used with getBulkDataportInfo() to retrieve dataport values More... | |
| struct | dynamixel_interface::DynamixelDiagnostic |
| data struct used with getBulkDiagnosticInfo() to retrieve diagnostics More... | |
| class | dynamixel_interface::DynamixelInterfaceDriver |
| struct | dynamixel_interface::DynamixelSpec |
| Struct that describes the dynamixel motor's static and physical properties. More... | |
| struct | dynamixel_interface::DynamixelState |
| data struct used with getBulkState() to retrieve physical state More... | |
| struct | dynamixel_interface::SyncData |
| Basic struct for representing dynamixel data exchange. More... | |
Namespaces | |
| dynamixel_interface | |
Detailed Description
Defines the hardware abstraction methods for communicating with dynamixels.
- Date
- January, 2017
Definition in file dynamixel_interface_driver.h.