|
| enum | LayerState |
| |
| typedef boost::shared_ptr< Layer > | VectorMemberSharedPtr |
| |
| | Error |
| |
| | Halt |
| |
| | Init |
| |
| const std::string | name |
| |
| | Off |
| |
| | Ready |
| |
| | Recover |
| |
| | Shutdown |
| |
| typedef std::vector< VectorMemberSharedPtr > | vector_type |
| |
| bool | handle_get_object (canopen_chain_node::GetObject::Request &req, canopen_chain_node::GetObject::Response &res) |
| |
| virtual bool | handle_halt (std_srvs::Trigger::Request &req, std_srvs::Trigger::Response &res) |
| |
| virtual bool | handle_init (std_srvs::Trigger::Request &req, std_srvs::Trigger::Response &res) |
| |
| virtual bool | handle_recover (std_srvs::Trigger::Request &req, std_srvs::Trigger::Response &res) |
| |
| bool | handle_set_object (canopen_chain_node::SetObject::Request &req, canopen_chain_node::SetObject::Response &res) |
| |
| virtual bool | handle_shutdown (std_srvs::Trigger::Request &req, std_srvs::Trigger::Response &res) |
| |
| virtual void | handleShutdown (LayerStatus &status) |
| |
| virtual void | handleWrite (LayerStatus &status, const LayerState ¤t_state) |
| |
| void | logState (const can::State &s) |
| |
| void | report_diagnostics (diagnostic_updater::DiagnosticStatusWrapper &stat) |
| |
| void | run () |
| |
| bool | setup_bus () |
| |
| bool | setup_heartbeat () |
| |
| bool | setup_nodes () |
| |
| bool | setup_sync () |
| |
| void | call_or_fail (FuncType func, FailType fail, Data &status) |
| |
| void | call_or_fail_rev (FuncType func, FailType fail, Data &status) |
| |
| virtual void | handleDiag (LayerReport &report) |
| |
| virtual void | handleHalt (LayerStatus &status) |
| |
| virtual void | handleInit (LayerStatus &status) |
| |
| virtual void | handleRead (LayerStatus &status, const LayerState ¤t_state) |
| |
| virtual void | handleRecover (LayerStatus &status) |
| |
| virtual void | handleShutdown (LayerStatus &status) |
| |
| virtual void | handleWrite (LayerStatus &status, const LayerState ¤t_state) |
| |
| virtual void | handleDiag (LayerReport &report)=0 |
| |
| virtual void | handleHalt (LayerStatus &status)=0 |
| |
| virtual void | handleInit (LayerStatus &status)=0 |
| |
| virtual void | handleRead (LayerStatus &status, const LayerState ¤t_state)=0 |
| |
| virtual void | handleRecover (LayerStatus &status)=0 |
| |
| vector_type::iterator | call (FuncType func, Data &status) |
| |
| vector_type::iterator | call (FuncType func, Data &status) |
| |
| vector_type::reverse_iterator | call_rev (FuncType func, Data &status) |
| |
| vector_type::reverse_iterator | call_rev (FuncType func, Data &status) |
| |
| void | destroy () |
| |
| boost::mutex | diag_mutex_ |
| |
| ros::Timer | diag_timer_ |
| |
| diagnostic_updater::Updater | diag_updater_ |
| |
| boost::shared_ptr< canopen::LayerGroupNoDiag< canopen::EMCYHandler > > | emcy_handlers_ |
| |
| struct canopen::RosChain::HeartbeatSender | hb_sender_ |
| |
| Timer | heartbeat_timer_ |
| |
| can::DriverInterfaceSharedPtr | interface_ |
| |
| std::vector< LoggerSharedPtr > | loggers_ |
| |
| MasterSharedPtr | master_ |
| |
| boost::mutex | mutex_ |
| |
| ros::NodeHandle | nh_ |
| |
| ros::NodeHandle | nh_priv_ |
| |
| boost::shared_ptr< canopen::LayerGroupNoDiag< canopen::Node > > | nodes_ |
| |
| std::map< std::string, canopen::NodeSharedPtr > | nodes_lookup_ |
| |
| std::vector< PublishFunc::FuncType > | publishers_ |
| |
| bool | reset_errors_before_recover_ |
| |
| boost::atomic< bool > | running_ |
| |
| ros::ServiceServer | srv_get_object_ |
| |
| ros::ServiceServer | srv_halt_ |
| |
| ros::ServiceServer | srv_init_ |
| |
| ros::ServiceServer | srv_recover_ |
| |
| ros::ServiceServer | srv_set_object_ |
| |
| ros::ServiceServer | srv_shutdown_ |
| |
| can::StateListenerConstSharedPtr | state_listener_ |
| |
| canopen::SyncLayerSharedPtr | sync_ |
| |
| boost::scoped_ptr< boost::thread > | thread_ |
| |
| time_duration | update_duration_ |
| |
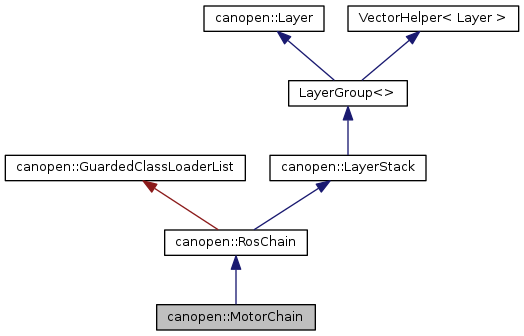
Definition at line 15 of file motor_chain.h.
 Public Member Functions inherited from canopen::RosChain
Public Member Functions inherited from canopen::RosChain