|
| void | advertiseTopics () |
| |
| void | configCallback (realsense_camera::r200_paramsConfig &config, uint32_t level) |
| |
| void | getCameraExtrinsics () |
| |
| void | getParameters () |
| |
| void | publishDynamicTransforms () |
| |
| void | publishStaticTransforms () |
| |
| std::string | setDynamicReconfigDepthControlIndividuals () |
| |
| void | setDynamicReconfigDepthControlPreset (int preset) |
| |
| std::vector< std::string > | setDynamicReconfServer () |
| |
| void | startDynamicReconfCallback () |
| |
| virtual void | publishSyncTopics () |
| |
| virtual void | publishTopic (rs_stream stream_index) |
| |
| virtual void | setFrameCallbacks () |
| |
| virtual void | setImageData (rs_stream stream_index) |
| |
| virtual void | advertiseServices () |
| |
| virtual void | checkError () |
| |
| virtual std::string | checkFirmwareValidation (const std::string &fw_type, const std::string ¤t_fw, const std::string &camera_name, const std::string &camera_serial_number) |
| |
| virtual bool | checkForSubscriber () |
| |
| virtual bool | connectToCamera () |
| |
| virtual void | disableStream (rs_stream stream_index) |
| |
| virtual void | enableStream (rs_stream stream_index, int width, int height, rs_format format, int fps) |
| |
| virtual void | getCameraOptions () |
| |
| virtual void | getStreamCalibData (rs_stream stream_index) |
| |
| virtual ros::Time | getTimestamp (rs_stream stream_index, double frame_ts) |
| |
| virtual std::vector< int > | listCameras (int num_of_camera) |
| |
| virtual void | prepareTransforms () |
| |
| virtual void | publishPCTopic () |
| |
| virtual void | publishTopic (rs_stream stream_index, rs::frame &frame) |
| |
| virtual void | setImageData (rs_stream stream_index, rs::frame &frame) |
| |
| virtual void | setStaticCameraOptions (std::vector< std::string > dynamic_params) |
| |
| virtual void | setStreams () |
| |
| virtual std::string | startCamera () |
| |
| virtual std::string | stopCamera () |
| |
| virtual void | wrappedSystem (const std::vector< std::string > &string_argv) |
| |
| ros::CallbackQueueInterface & | getMTCallbackQueue () const |
| |
| ros::NodeHandle & | getMTNodeHandle () const |
| |
| ros::NodeHandle & | getMTPrivateNodeHandle () const |
| |
| const V_string & | getMyArgv () const |
| |
| const std::string & | getName () const |
| |
| ros::NodeHandle & | getNodeHandle () const |
| |
| ros::NodeHandle & | getPrivateNodeHandle () const |
| |
| const M_string & | getRemappingArgs () const |
| |
| ros::CallbackQueueInterface & | getSTCallbackQueue () const |
| |
| std::string | getSuffixedName (const std::string &suffix) const |
| |
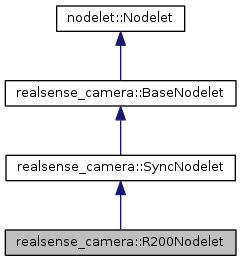
Definition at line 45 of file r200_nodelet.h.
 Public Member Functions inherited from realsense_camera::SyncNodelet
Public Member Functions inherited from realsense_camera::SyncNodelet